Introducing NCD’s long-range wireless TVOC and CO2eq Gas Sensor With temperature humidity sensor, boasting up to a 28 Mile range using a wireless mesh networking architecture. Incorporating the SGPS30 and SHT30 temperature humidity sensor, transmits highly accurate TVOC, Co2eq, Raw Ethanol, H2, temperature and humidity samples at user-defined intervals.
The on-board temperature sensor is rated for -25°C to 85°C or -13°F to 185°F and the humidity sensor is rated for 0 to 100% RH. Powered by just 4 AA batteries and an operational lifetime of 300,000 wireless transmissions, a 10 years battery life can be expected depending on environmental conditions and the data transmission interval. Optionally, this sensor may be externally powered.
| Output | Range | Resolution |
| TVOC | 0 ppb – 2008 ppb | 1 ppb |
| | 2008 ppb – 11110 ppb | 6 ppb |
| | 11110 ppb – 60000 ppb | 32 ppb |
| CO2eq | 400 ppm – 1479 ppm | 1 ppm |
| | 1479 ppm – 5144 ppm | 3 ppm |
| | 5144 ppm – 17597 ppm | 9 ppm |
| | 17597 ppm – 60000 ppm | 31 ppm |
The Minimum data transmission interval for this TVOC and CO2eq Gas Sensor 1 min .
Sensor calibration / initial start up routine
Place the sensor in a cleanest possible area for first 60 seconds
- After the first boot
- After reset
- After changing batteries
- After power cycle
During the first 60 seconds sensor will self calibrate and will use these environment condition as base condition.
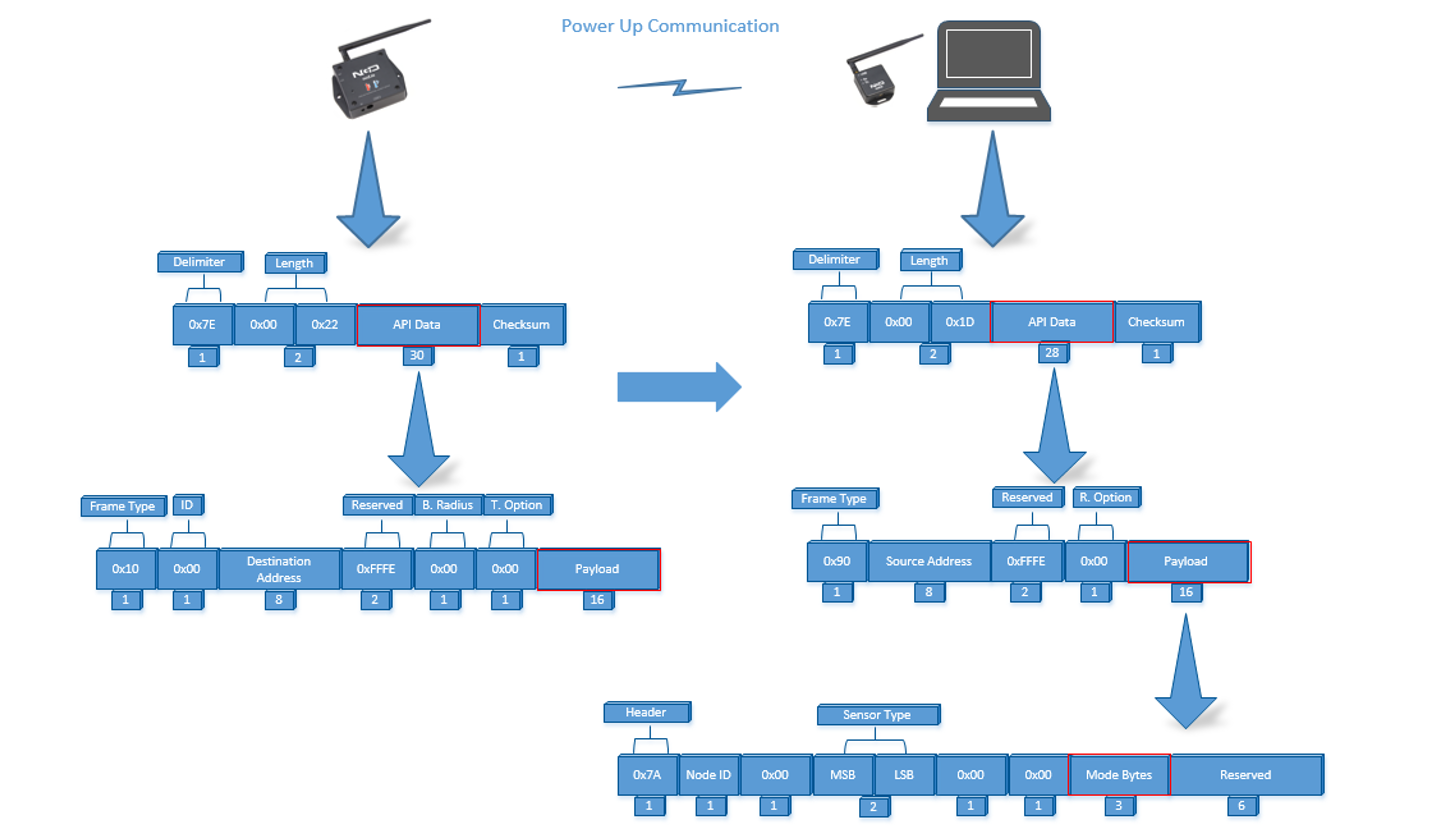
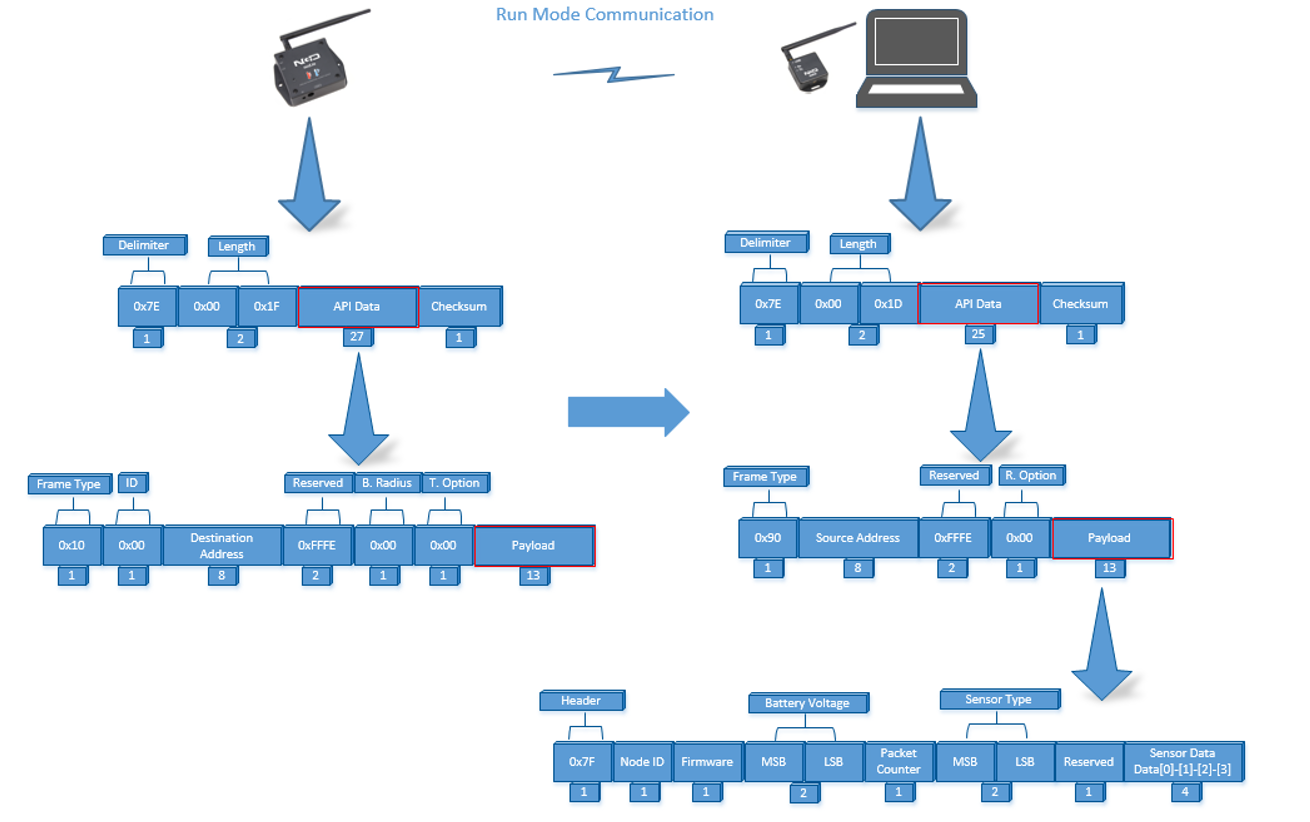
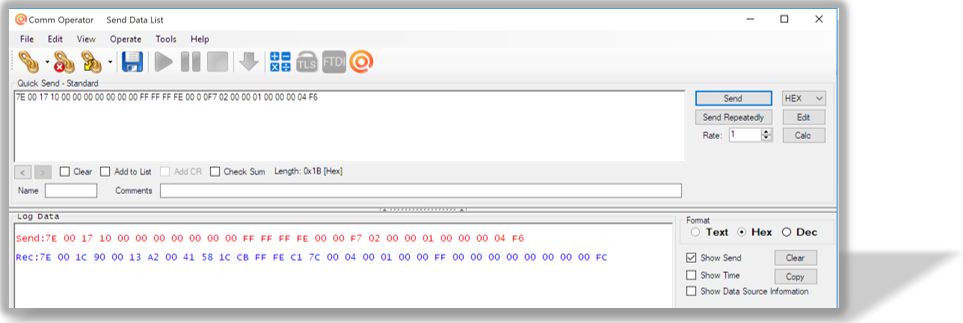
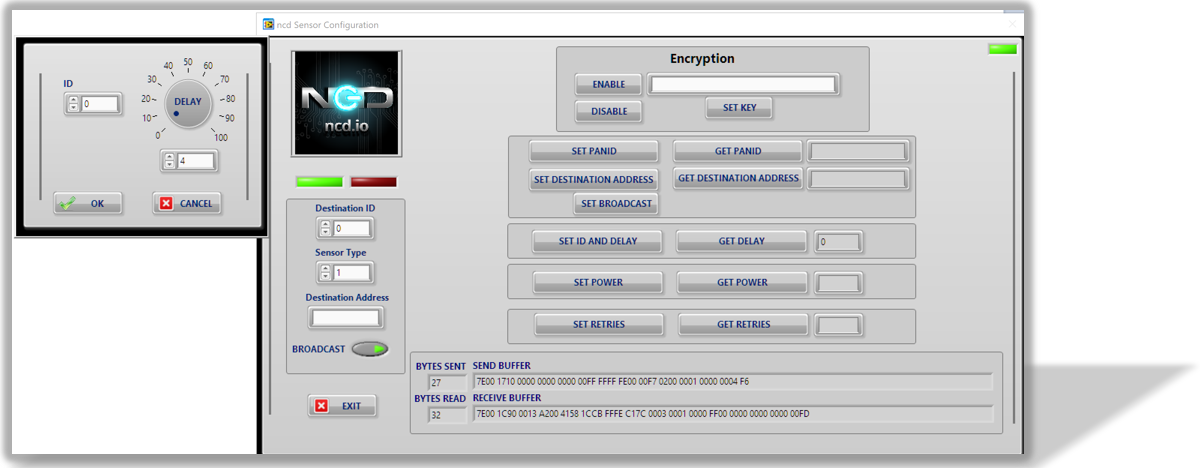
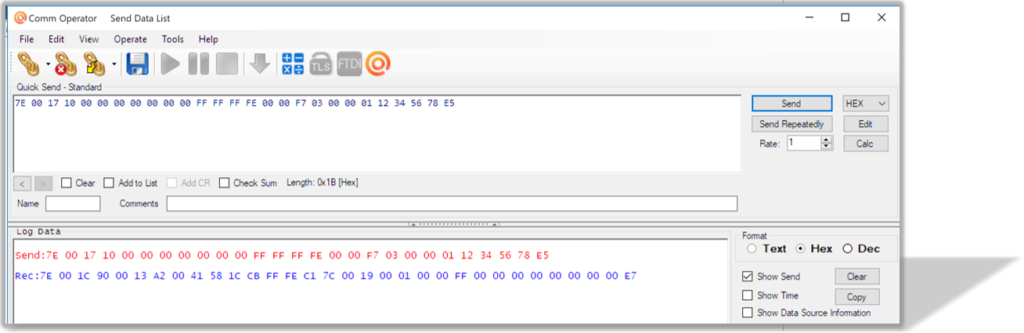
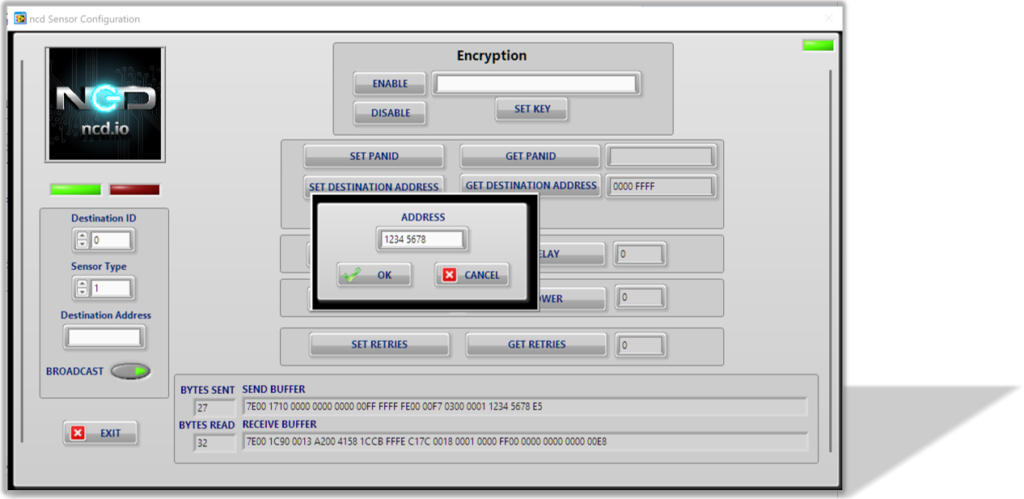
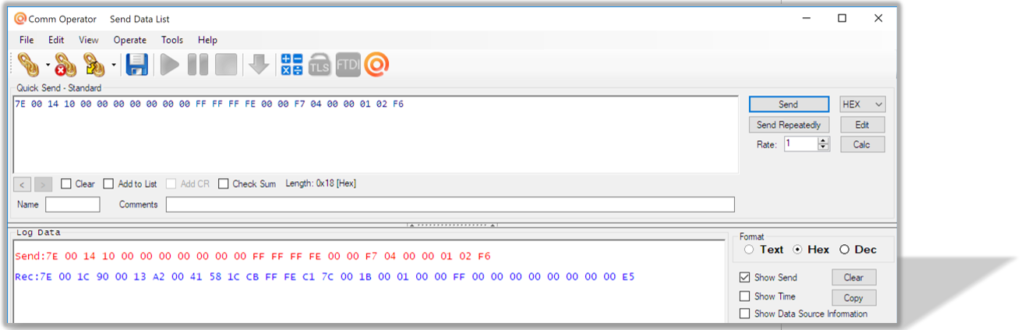
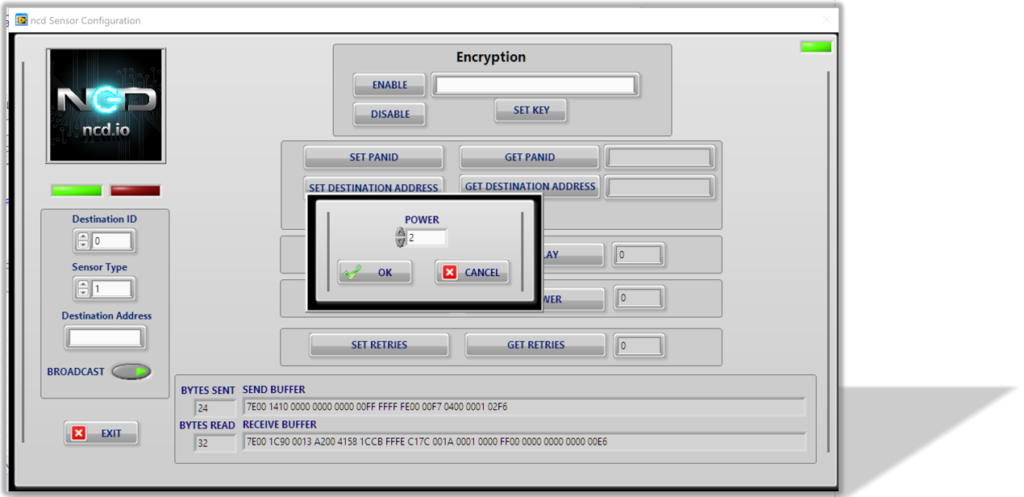
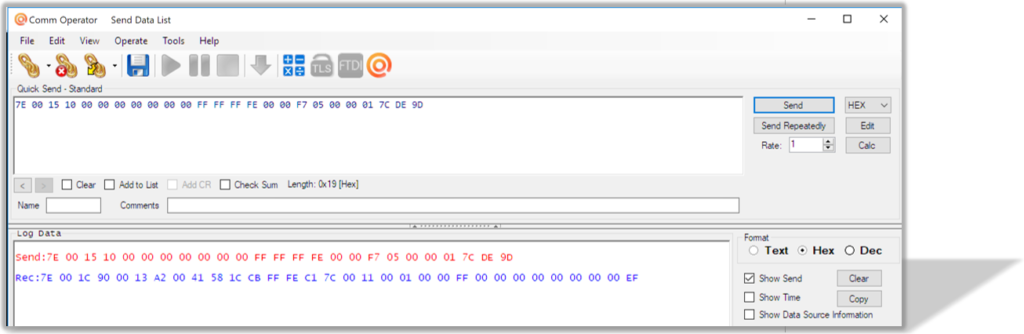
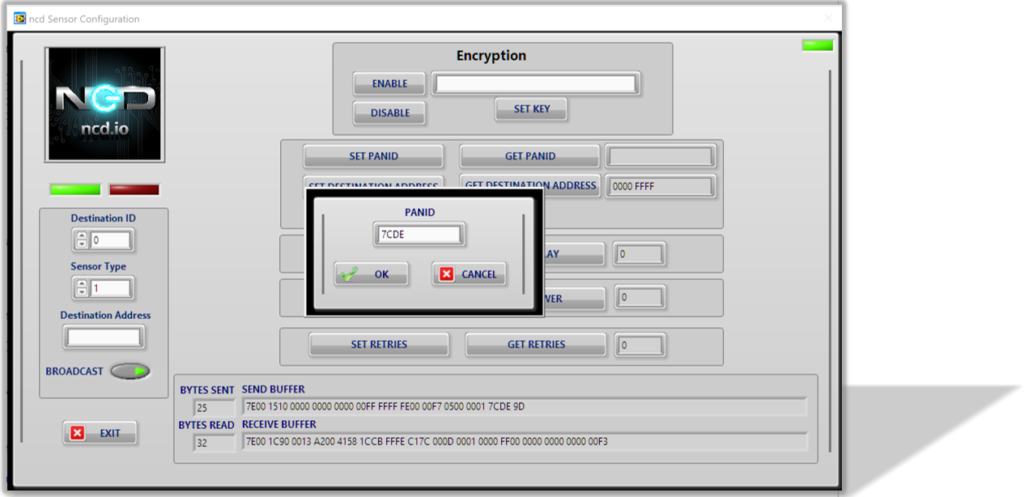
With an open communication protocol this IoT wireless TVOC and CO2eq Gas Sensor for Air Quality Monitoring product can be integrated with just about any control system or gateway. Data can be transmitted to a PC, a Raspberry Pi, to Microsoft Azure® IoT, or Arduino. Sensor parameters and wireless transmission settings can be changed on the go using the open communication protocol providing maximum configurability depending on the intended application.
The long range, price, accuracy, battery life and security features of Long Range Wireless TVOC and CO2eq Gas Sensor for Air Quality Monitoring makes it an affordable choice which exceeds the requirements for most of the industrial as well as consumer market applications.