Introducing NCD’s Enterprise Wireless Vibration Sensor, boasting up to a 28 Mile range using a 900MHz wireless mesh networking architecture or 1 Mile using 2.4GHz wireless mesh networking architecture. Incorporating an DC coupled acceleration sensor and a temperature sensor, the frequency response is from 0 Hz to user defined upper cutoff frequency. It samples and processes vibration data at user defined sampling rate and bandwidth, and then transmits this information to user defined receiver(s). The whole process is repeated at user defined intervals.
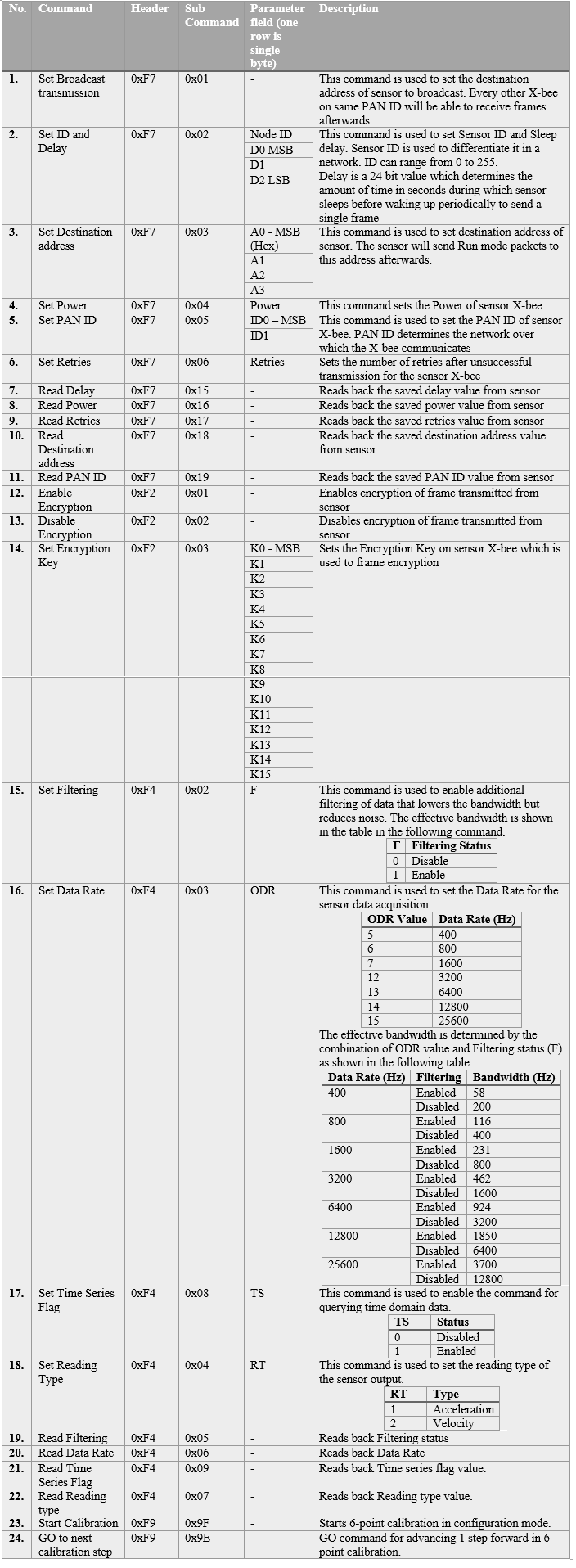
The Enterprise Wireless Vibration Sensor removes the offsets and accounts for sensitivity variation of the internal sensing element. It has an internal memory which stores the 0-g offsets and sensitivities for each axis. Default factory saved values usually provide the required accuracy, however, the sensor incorporates a 6-point calibration routine that can be initiated in the configuration mode by the user to carry out 6-point calibration as described in configuration section. This process overrides the factory default values however, the settings can be restored as discussed in troubleshooting section.
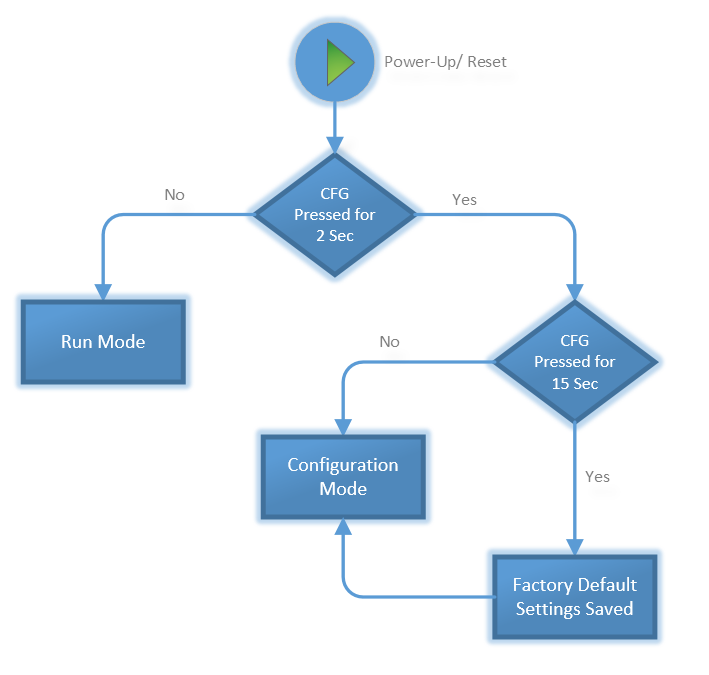
At power up or reset, the sensor calibrates itself so that it can remove 0-g offsets as well as gravity vector from future readings. This process may take up 10 seconds. This process does not require the sensor to be placed on a stationary platform. Hence, it can be mounted on running machines at any angle and a simple reset of the sensor allows it to calibrate itself.
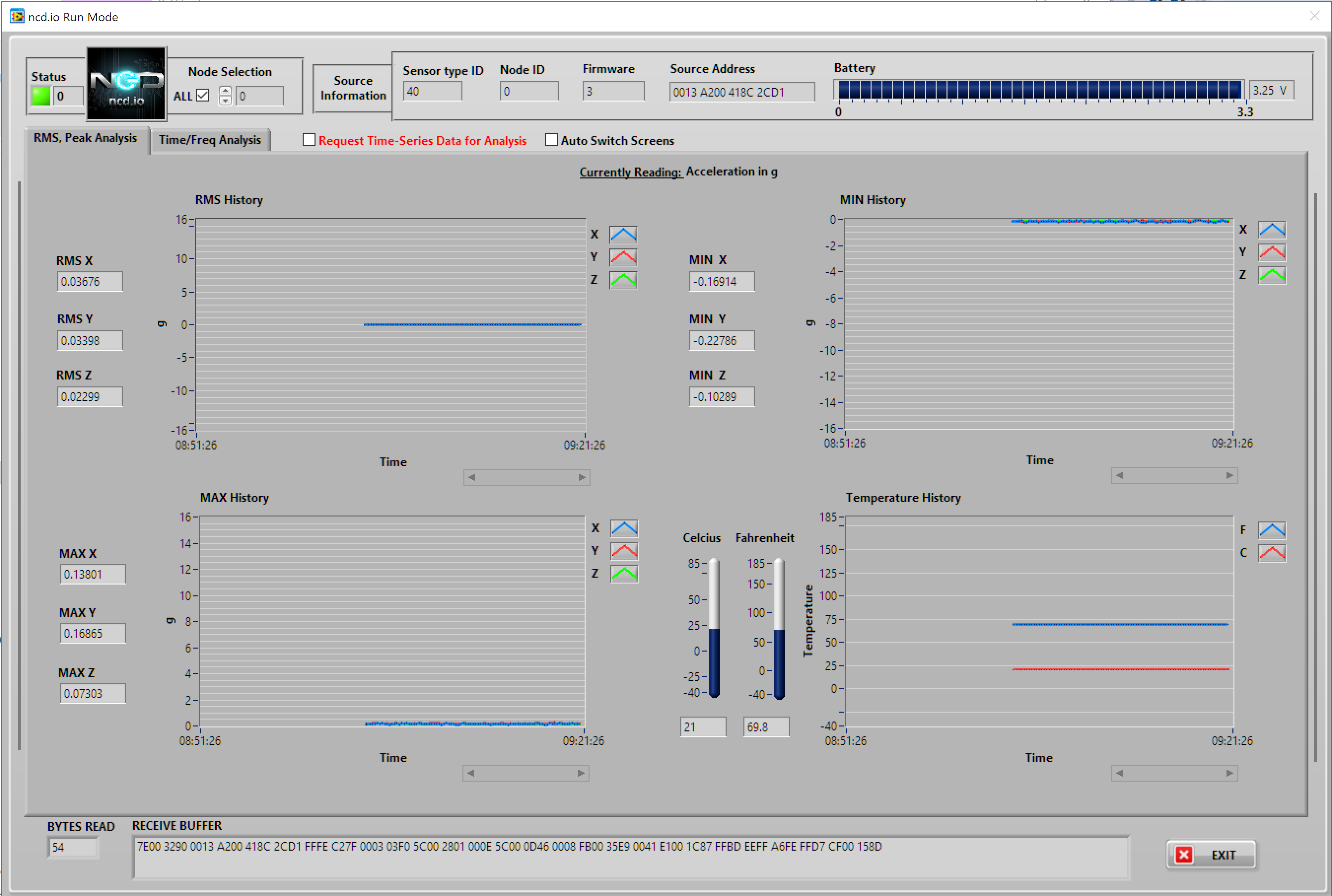
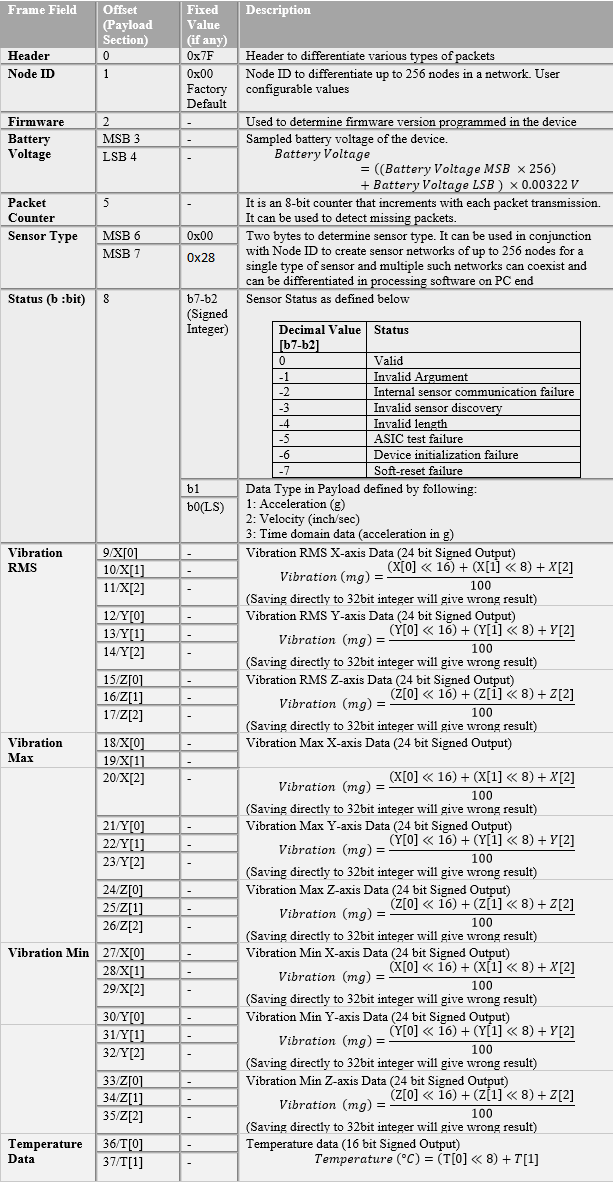
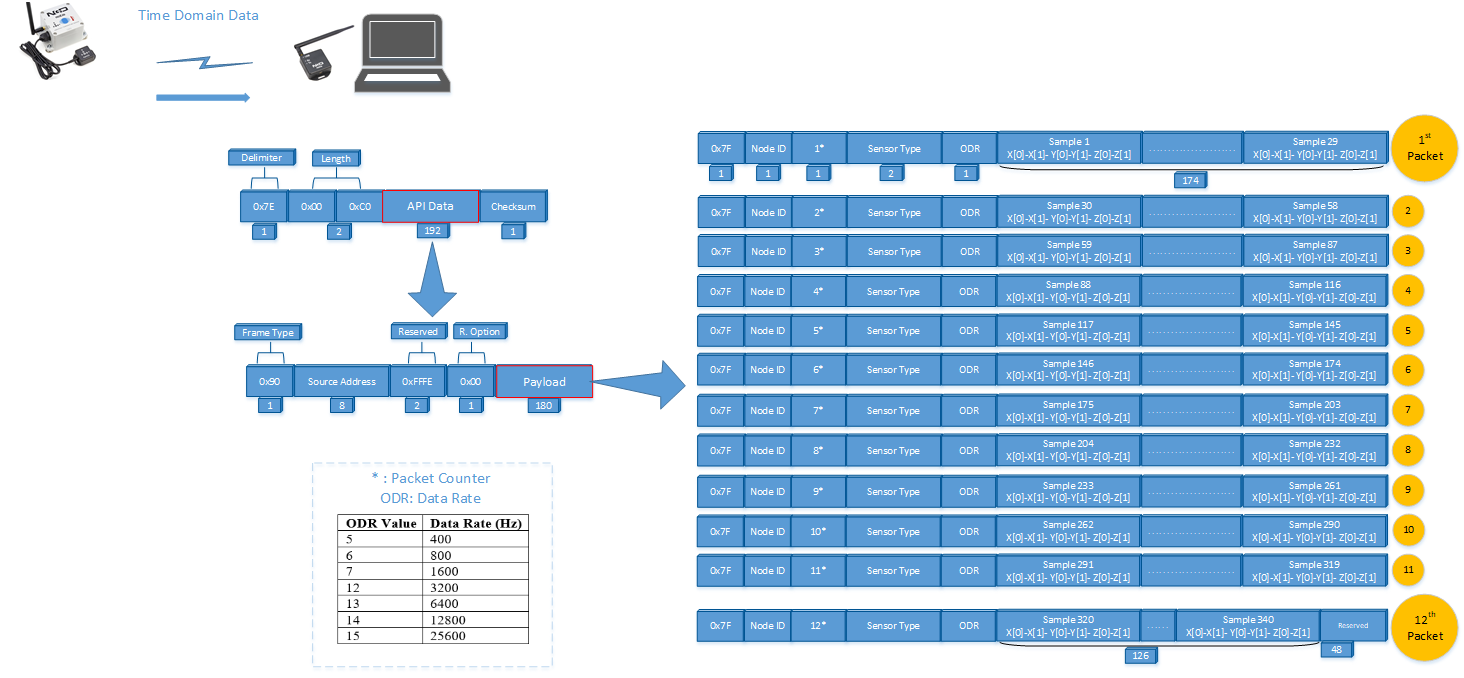
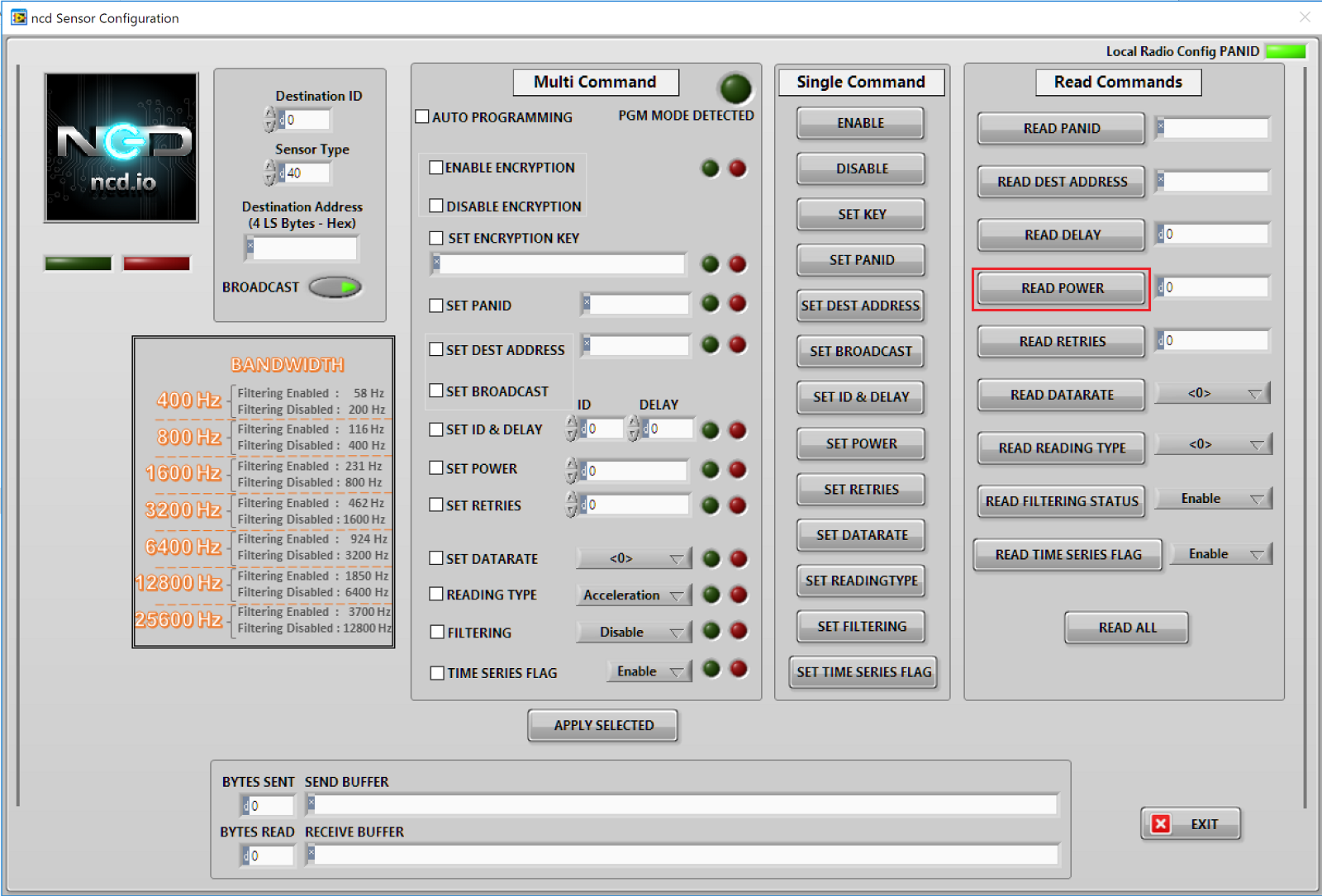
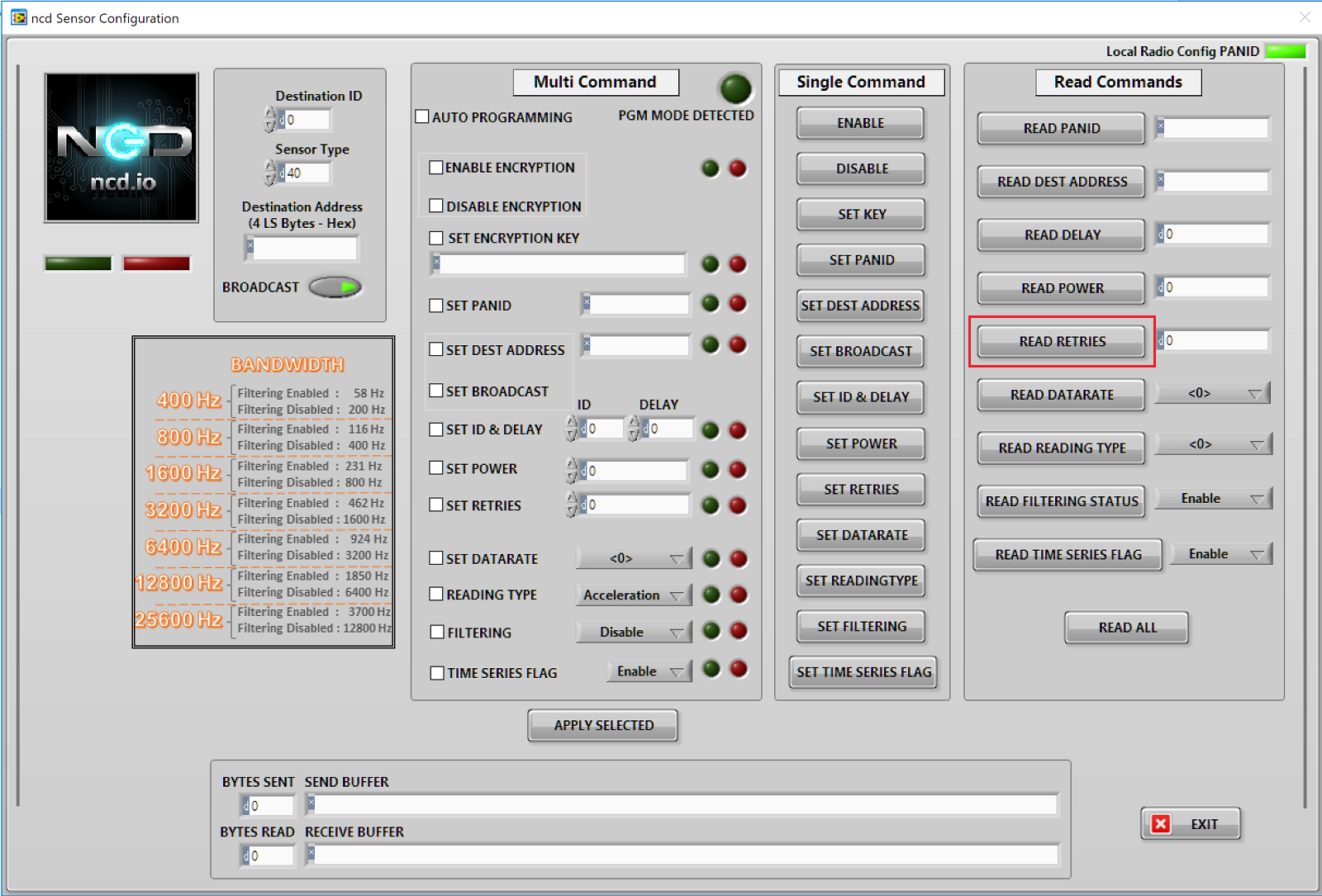
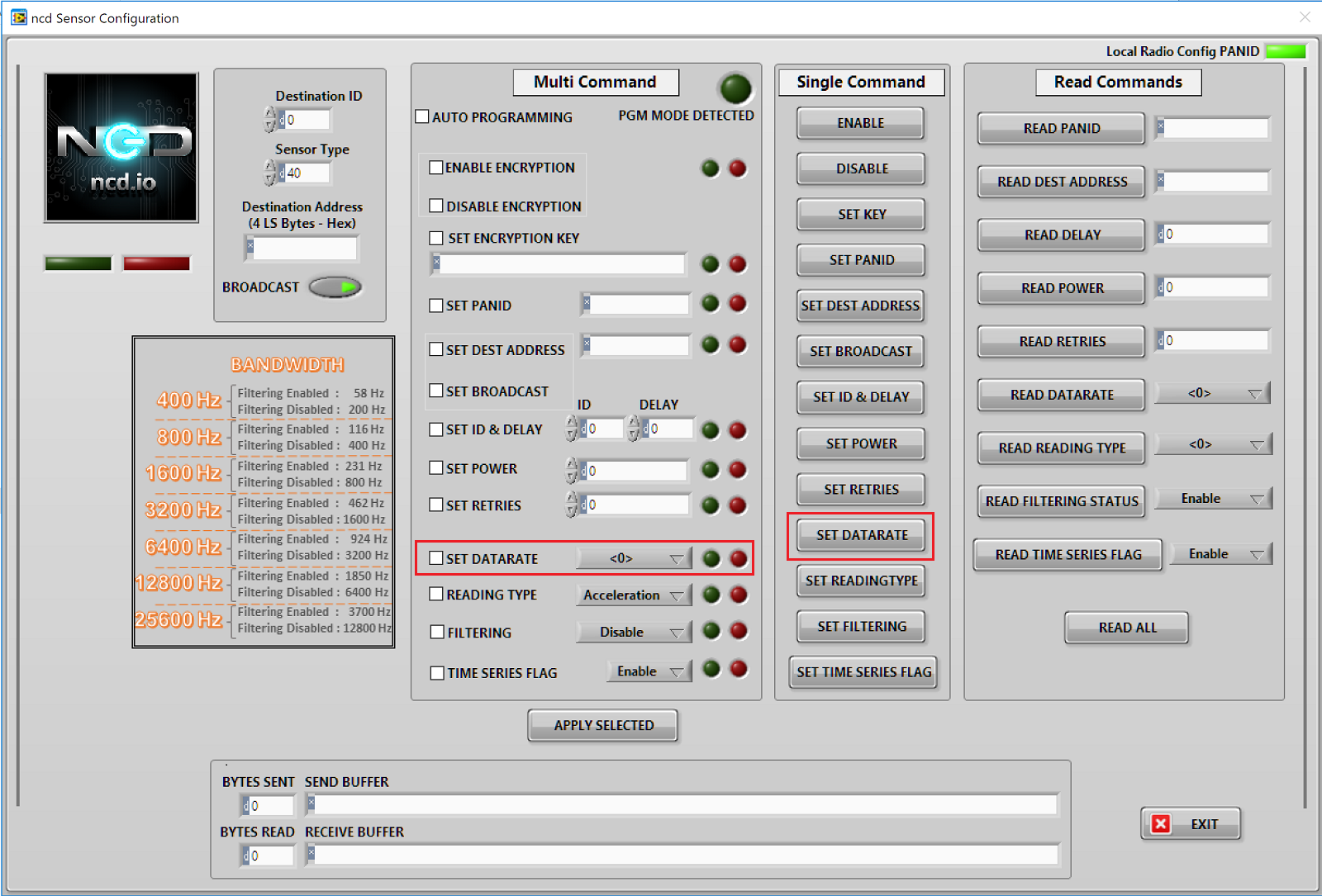
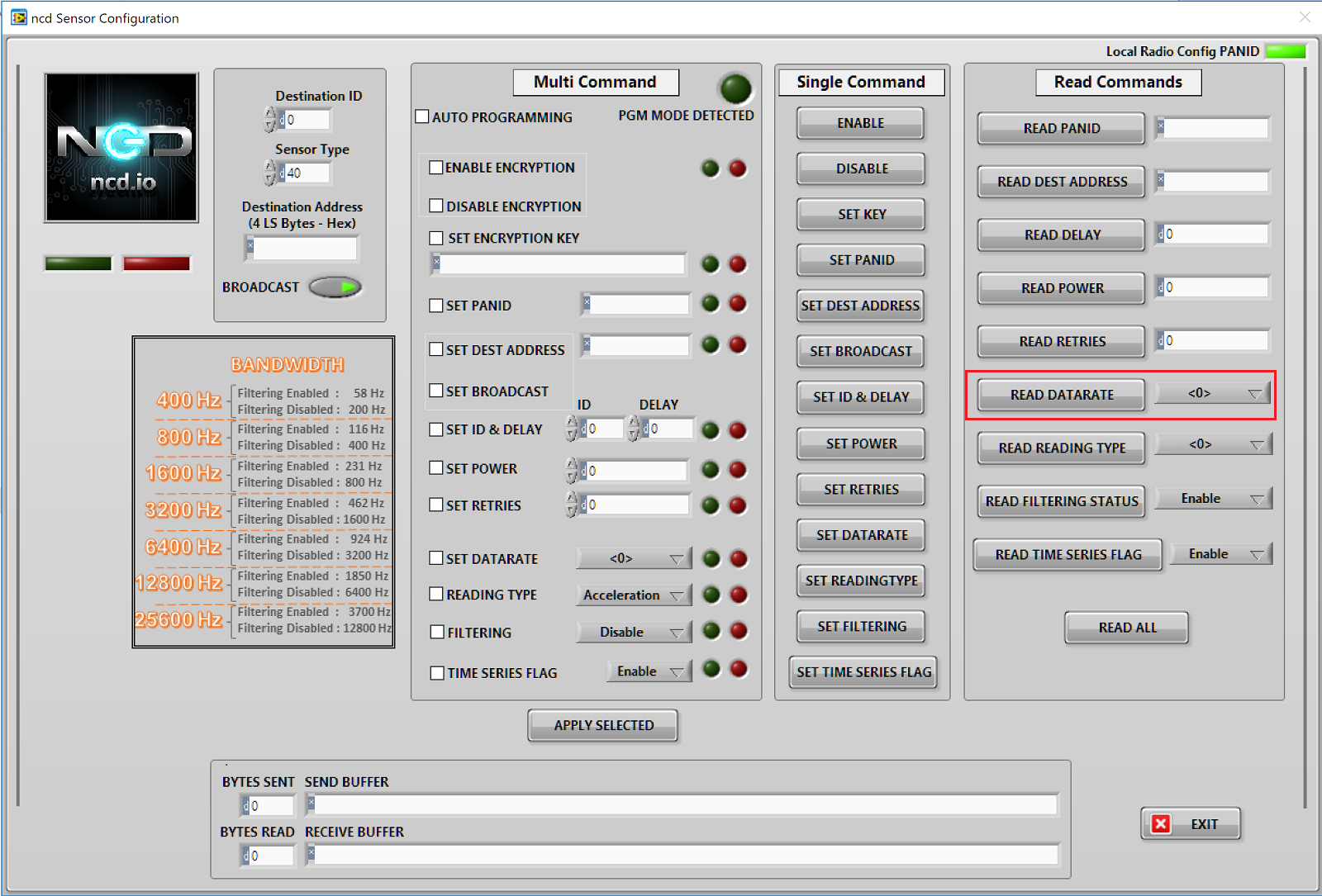
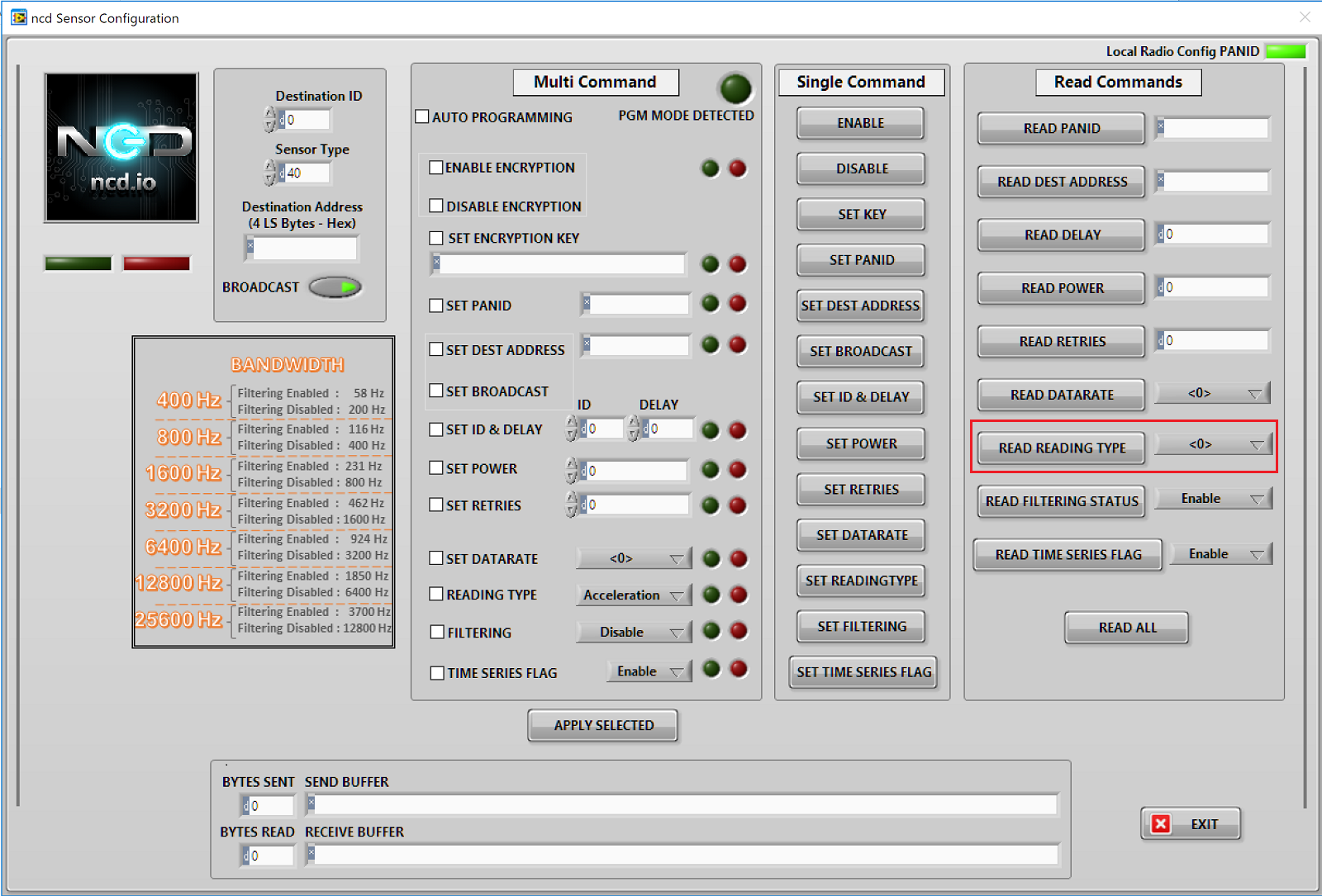
The sensor accumulates 340 samples for each of the 3-axis and processes them to calculate RMS, Maximum and Minimum Vibration in this interval. The sample accumulation period thus varies with the configurable sampling rate. A low sampling rate increases the sample accumulation period, hence care should be exercised since it increases the duration for which the sensor is powered up and thus drains the battery. For example, sample accumulation period for a sampling rate of 400 Hz turns out to be 850msec, whereas, for a sampling rate of 25.6 kHz, it is reduced to13.3msec. The resultant information is then combined with temperature read from a temperature sensor and sent to one or multiple receivers. After data transmission, the sensor goes to sleep for a user defined interval, thus minimizing power consumption.
Powered by just 2 AA batteries and an operational lifetime of 500,000 wireless transmissions, a 5 years battery life can be expected depending on environmental conditions and the data transmission interval. Optionally, this sensor may be externally powered.
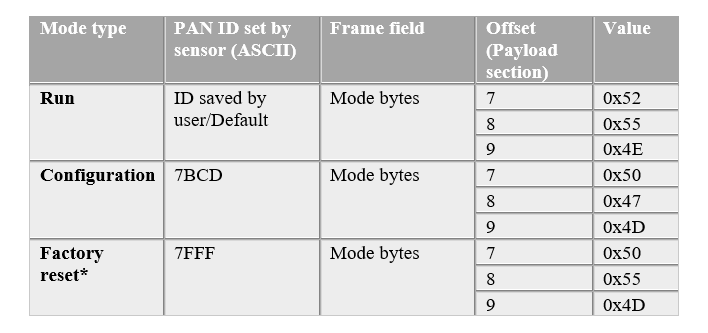
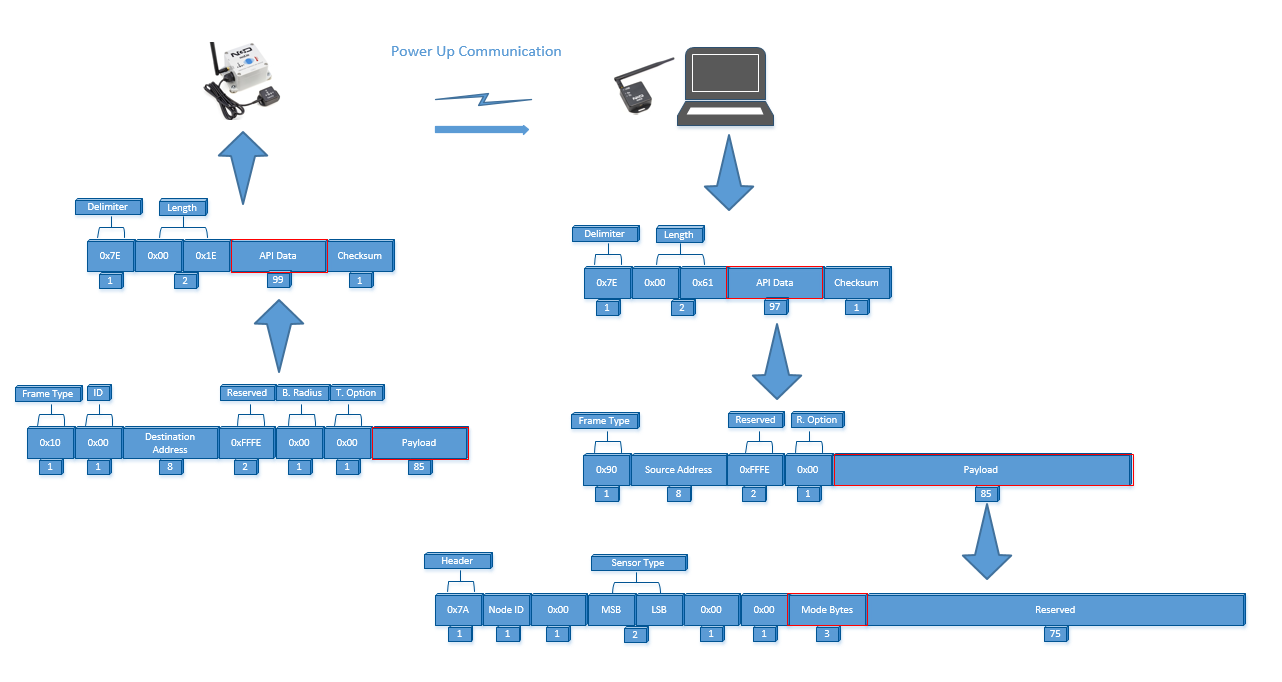
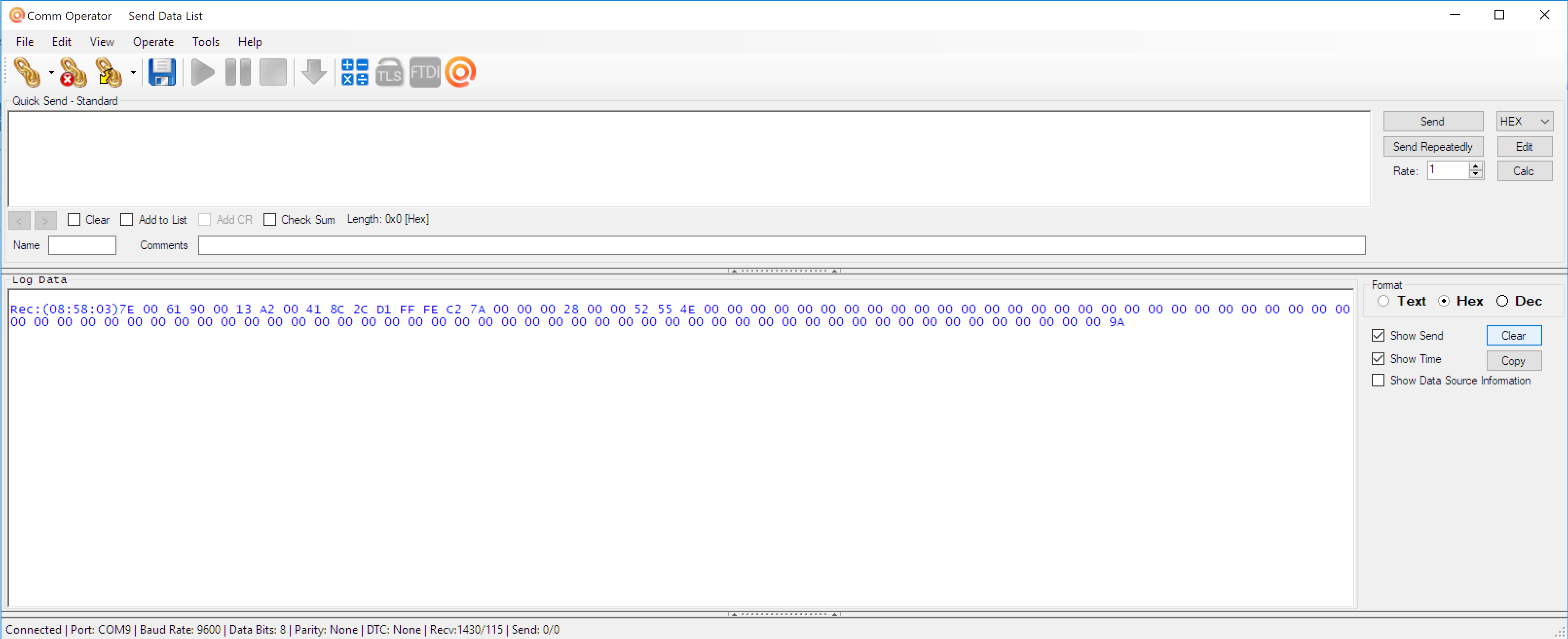
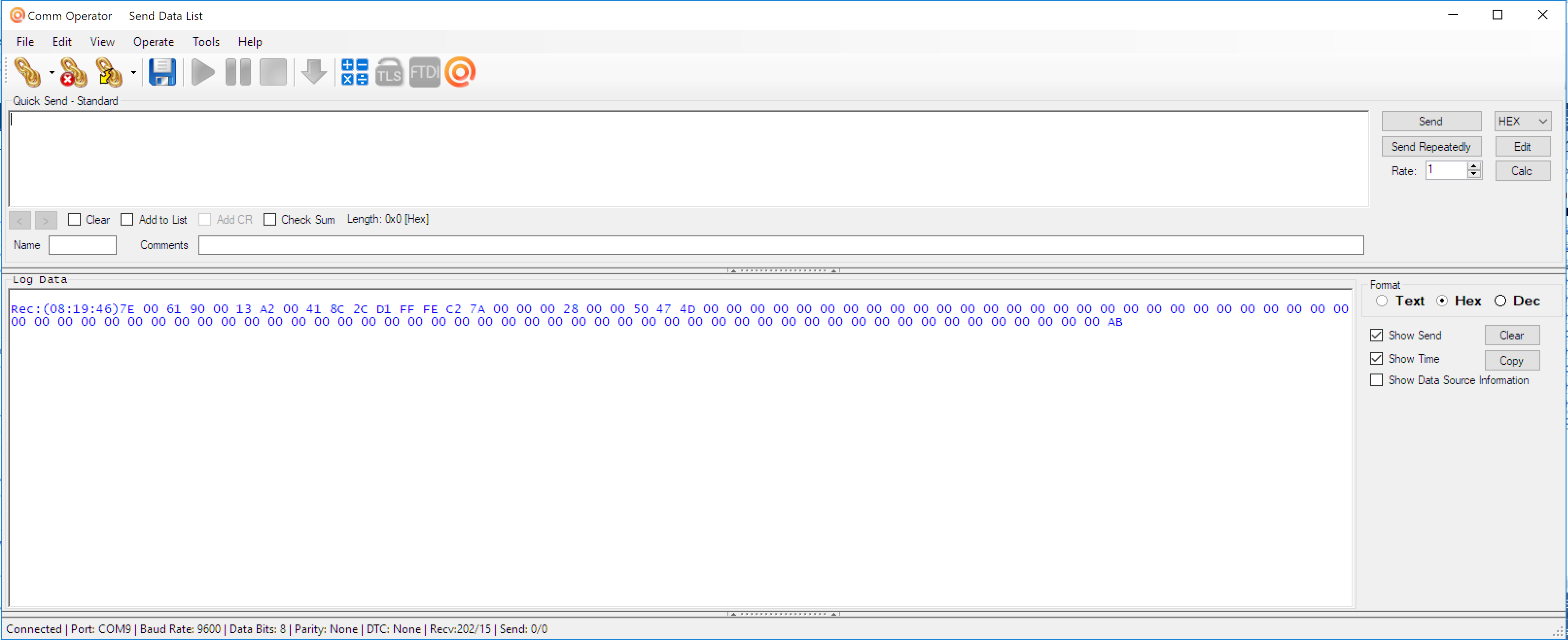
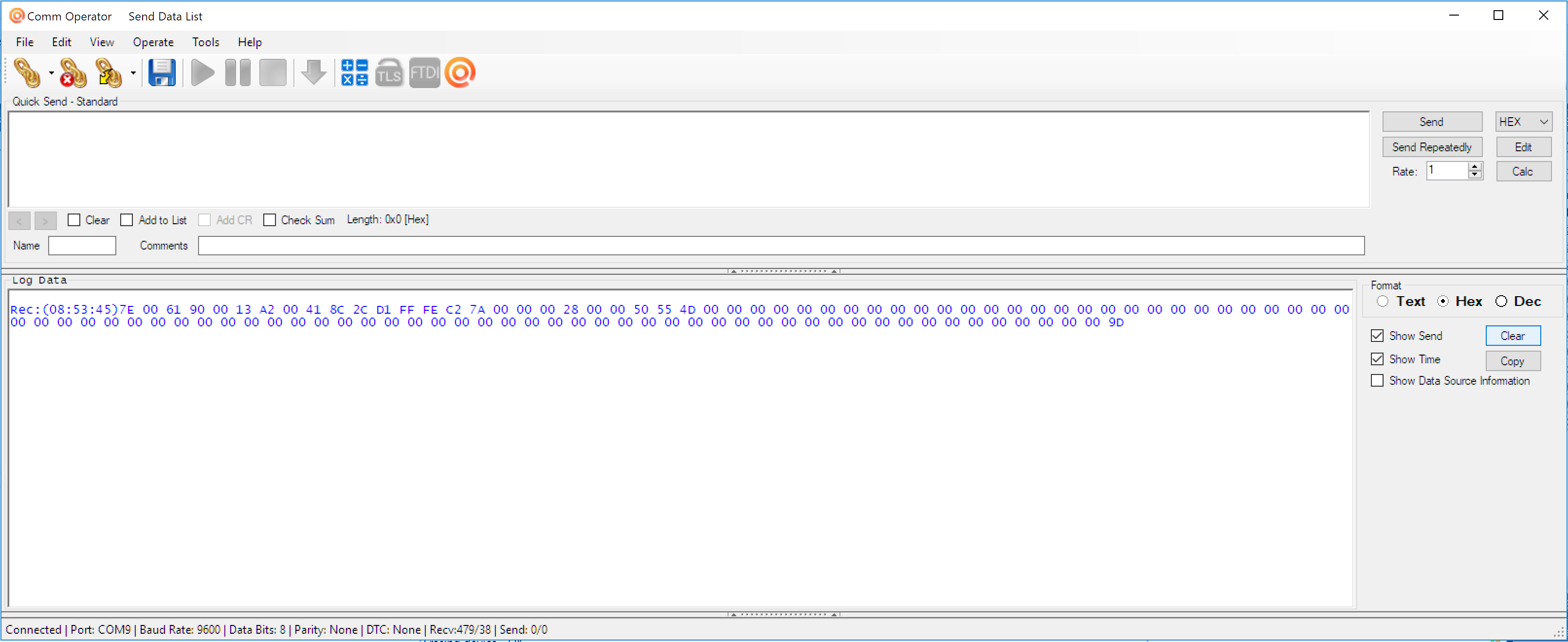
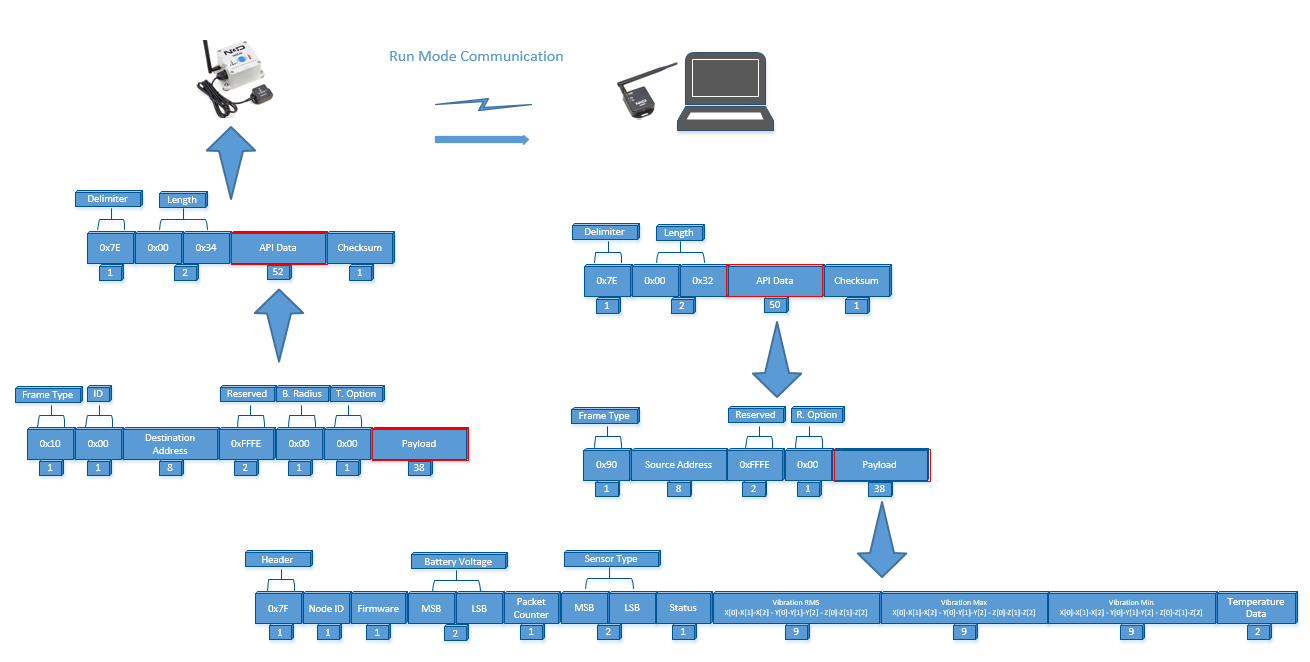
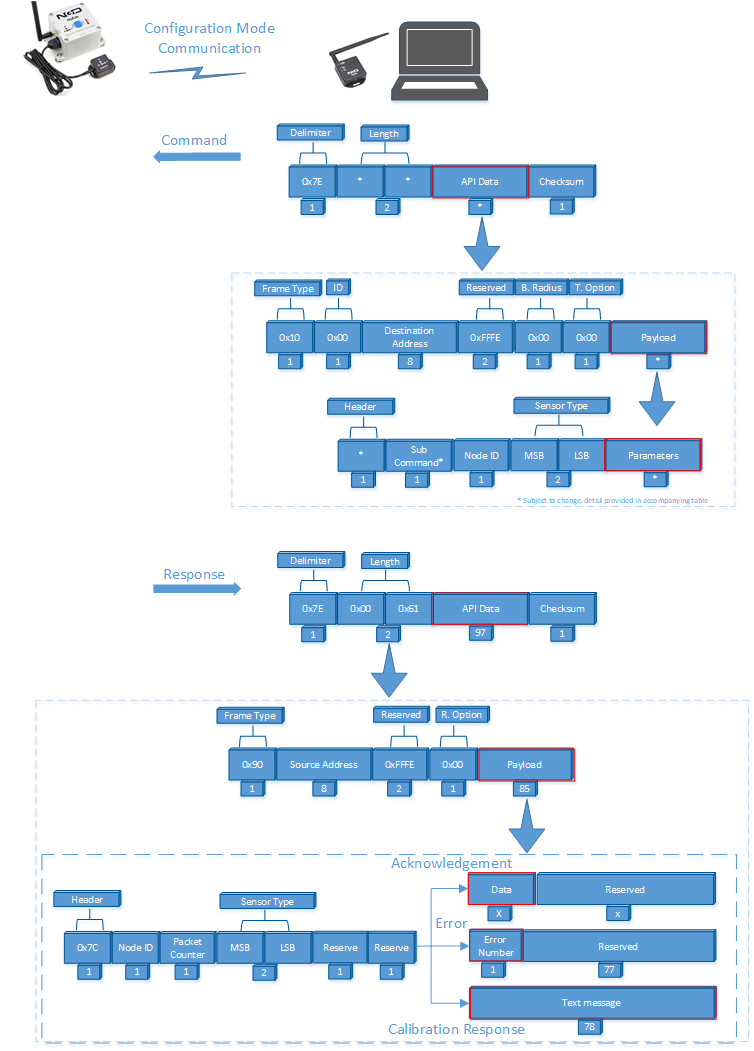
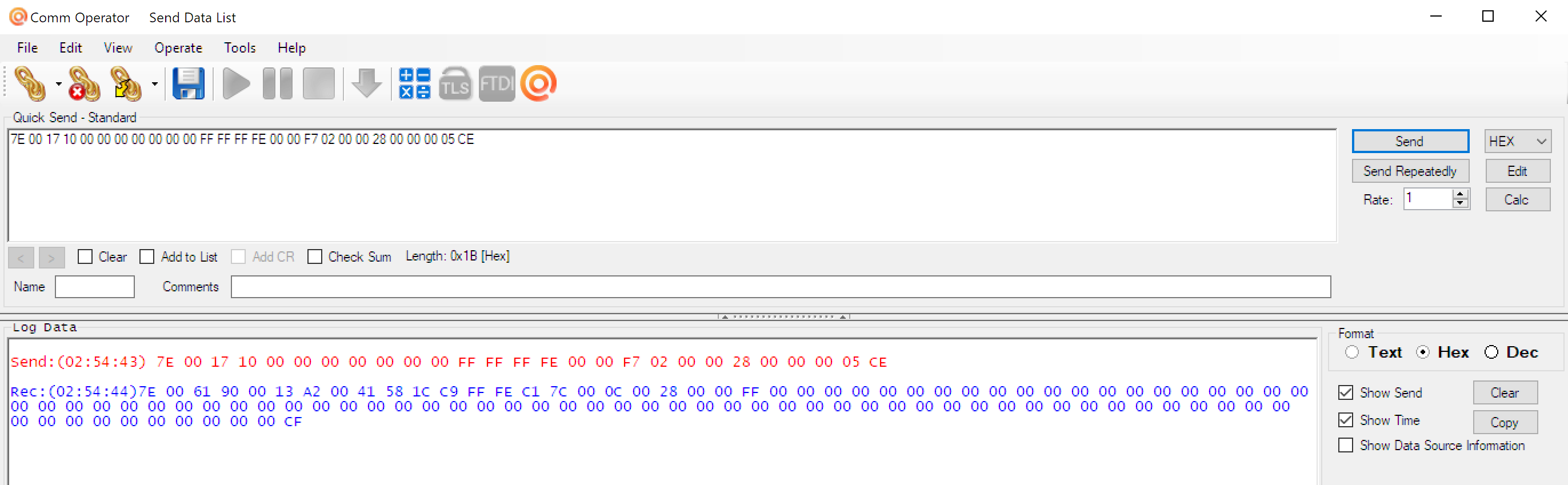
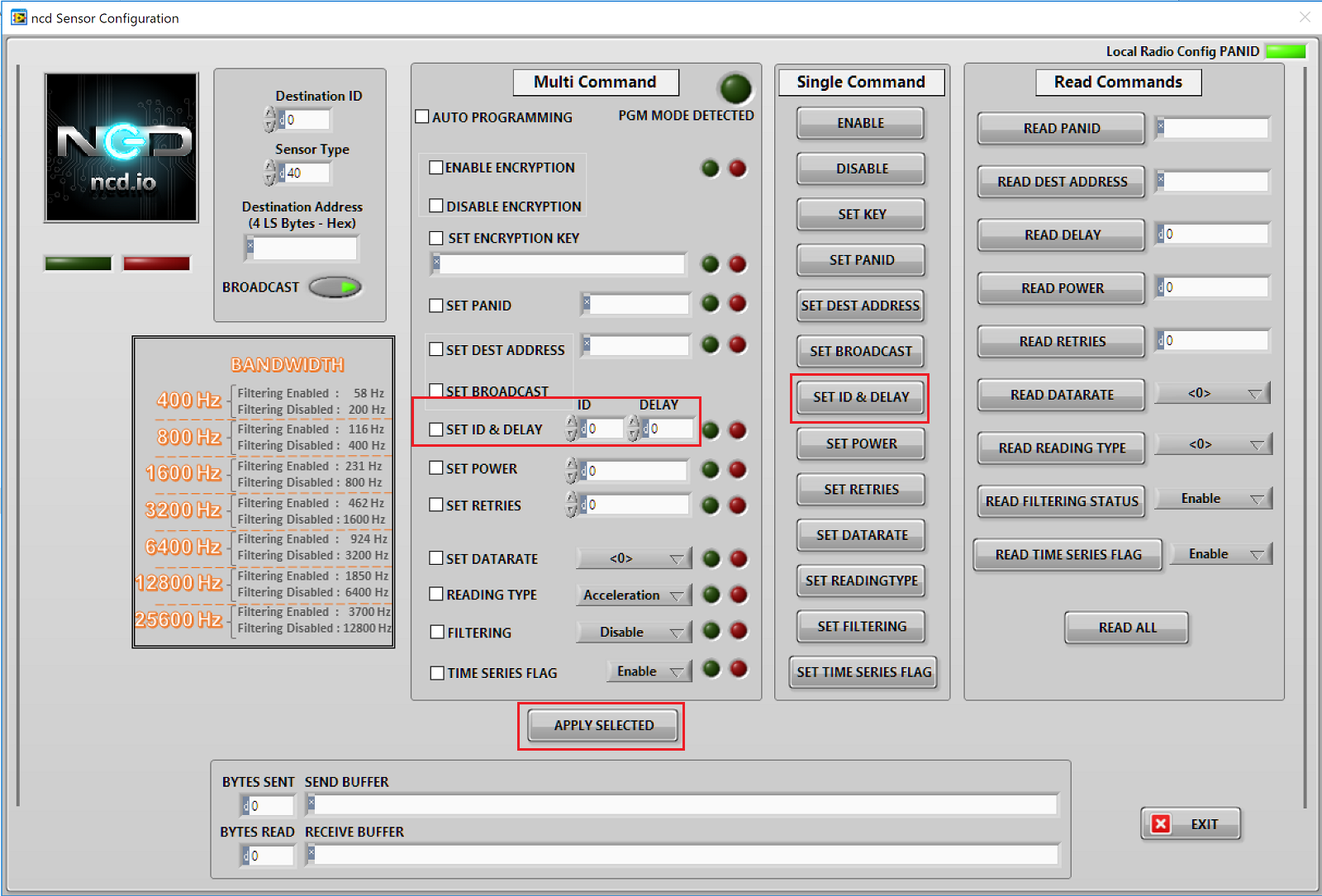
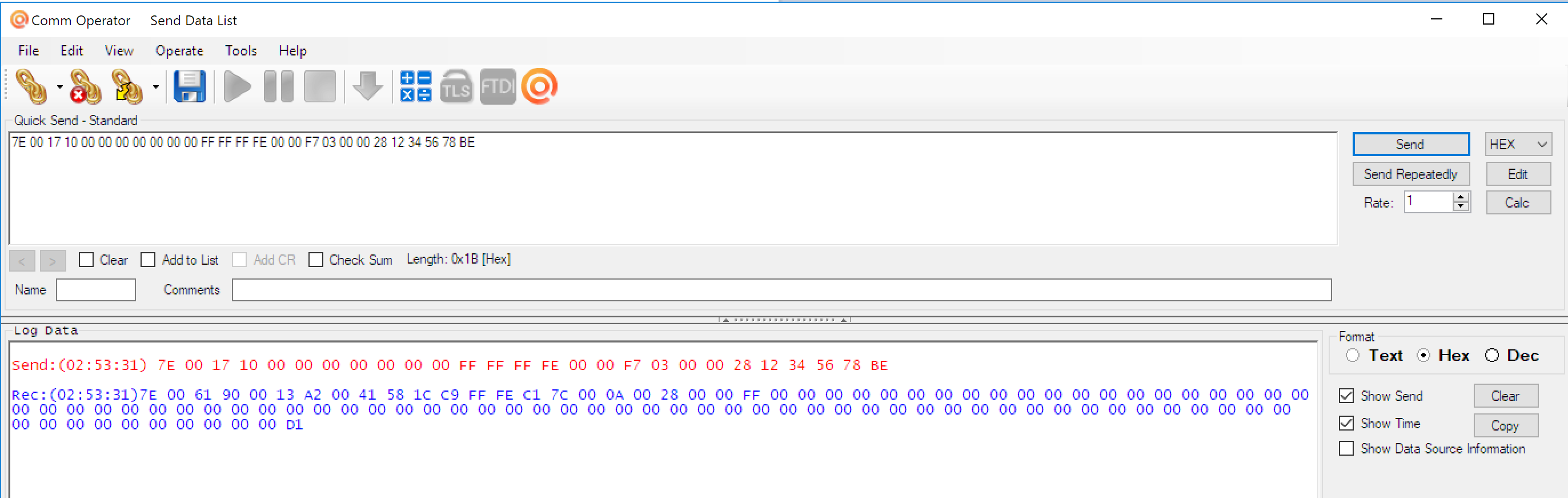
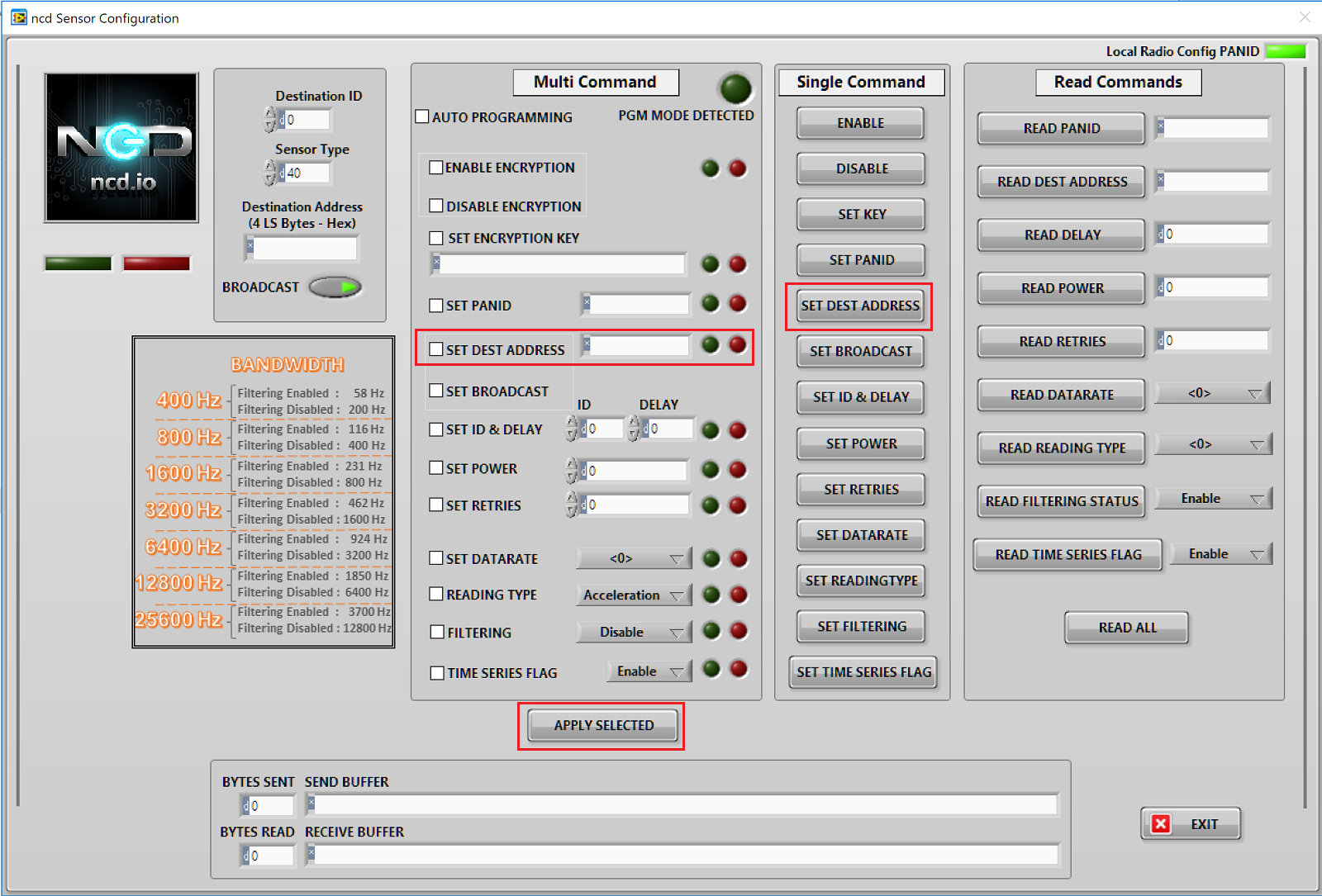
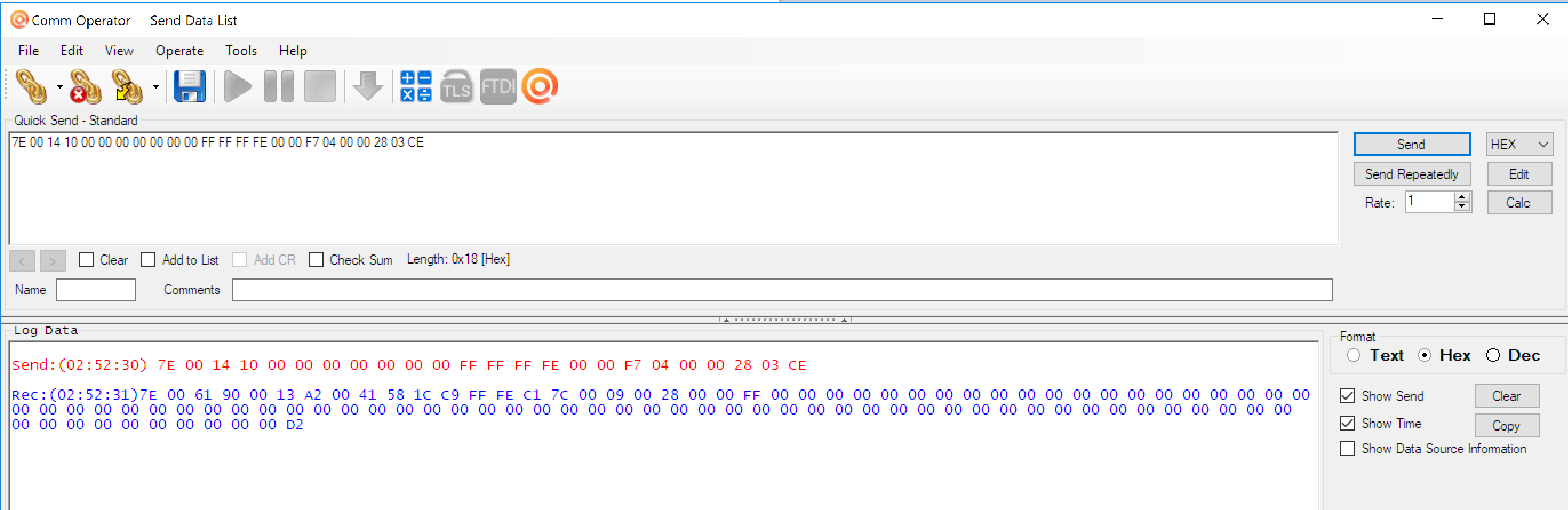
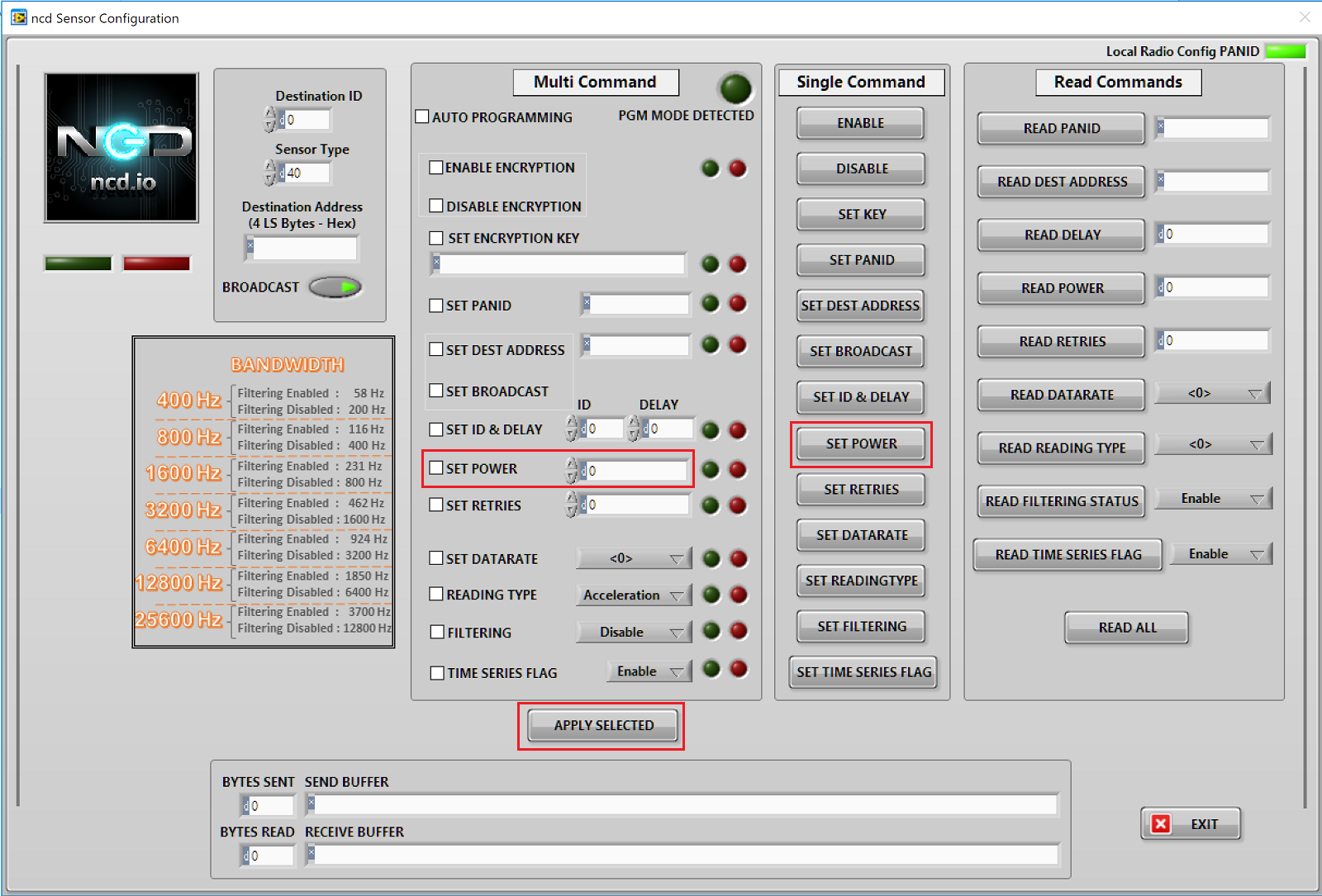
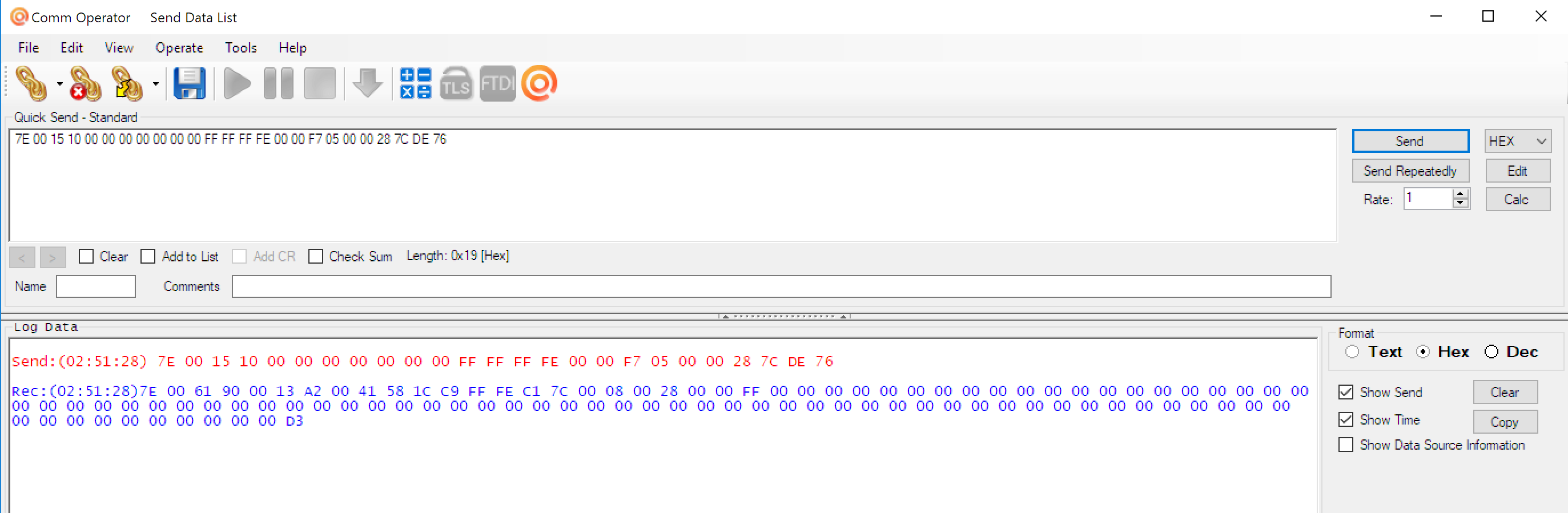
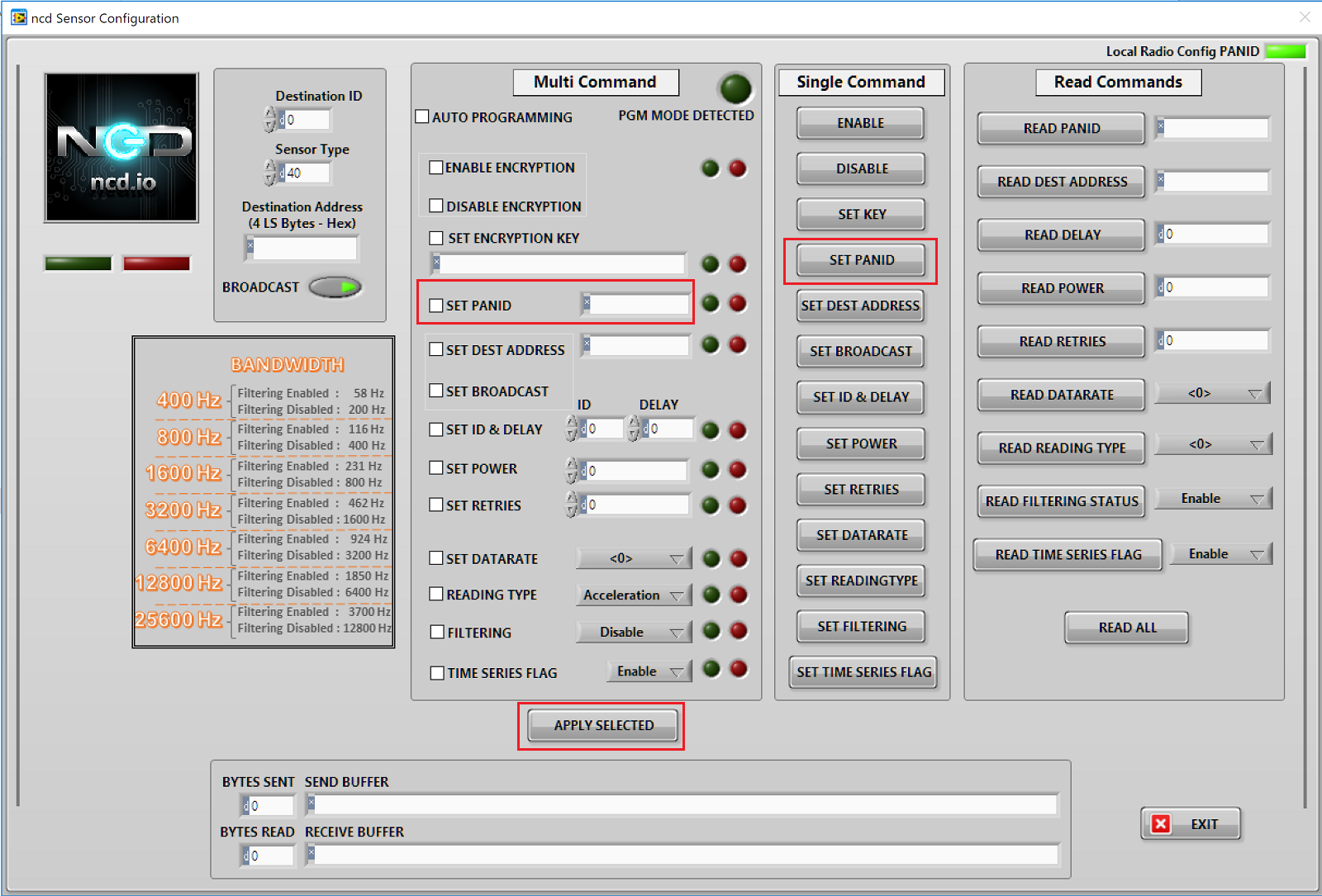
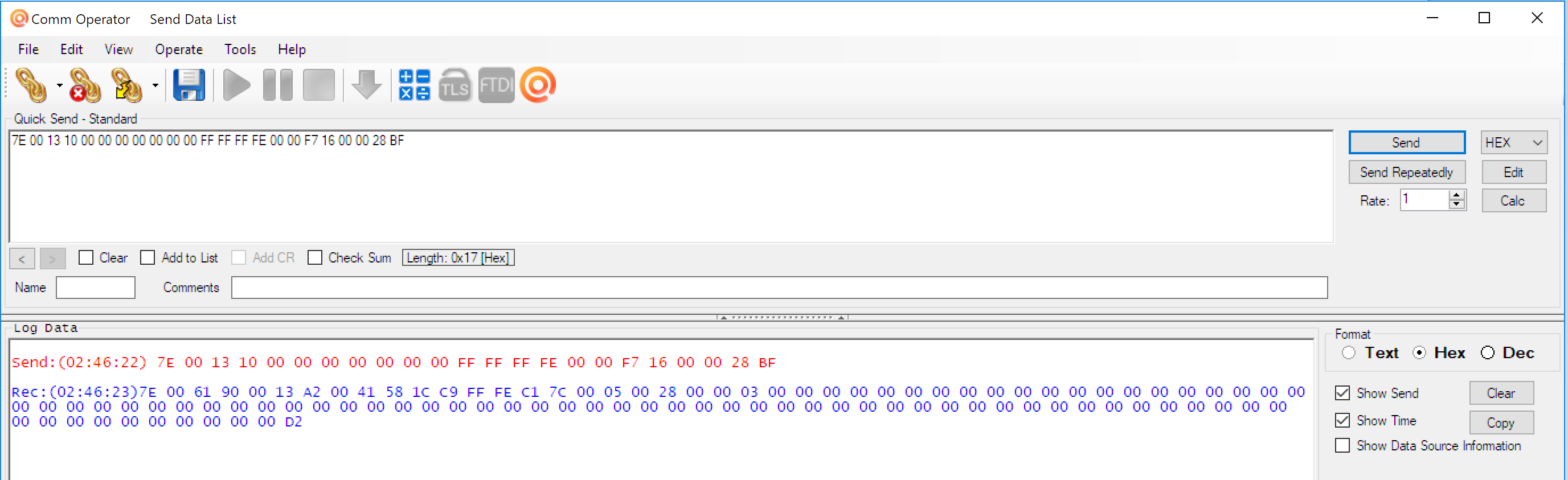
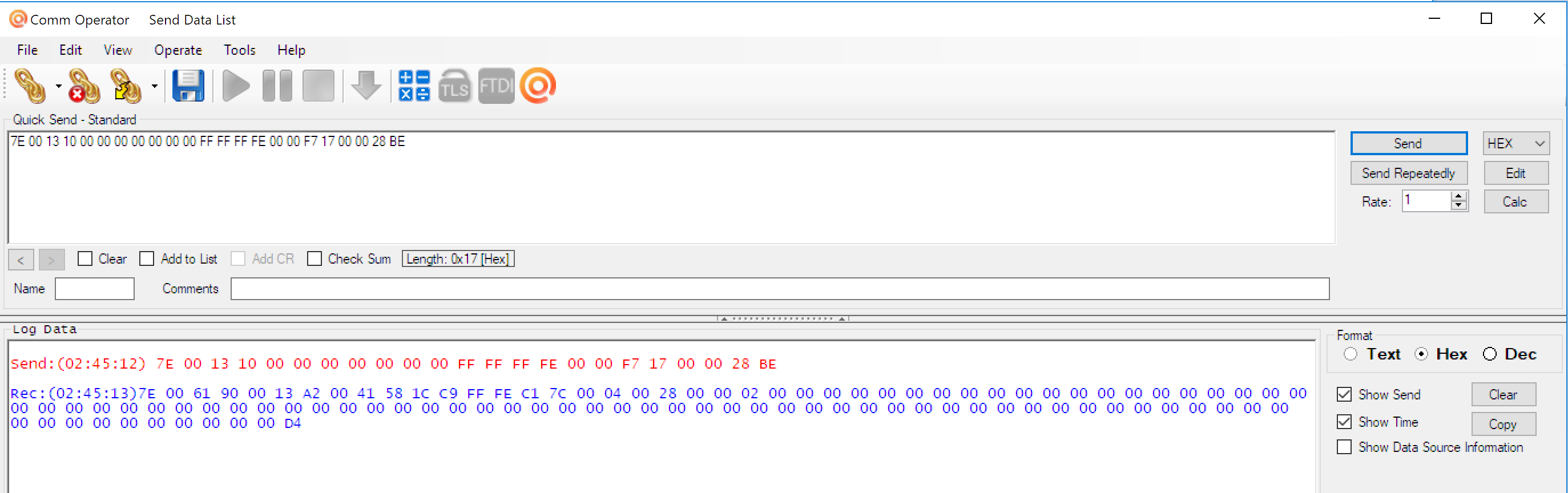
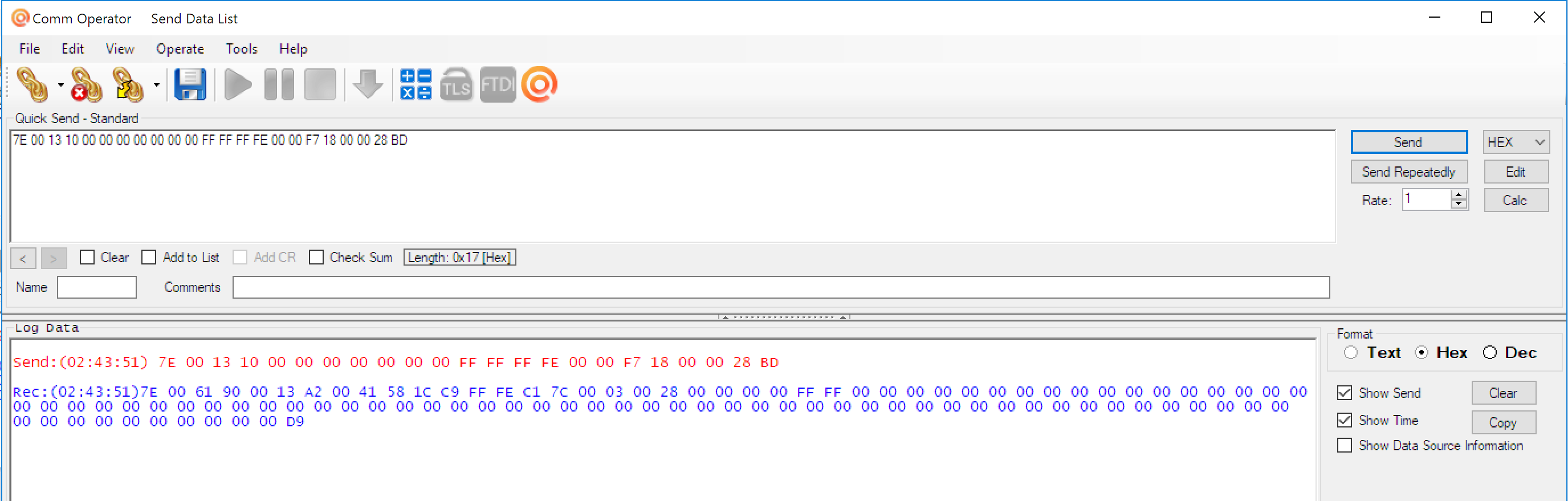
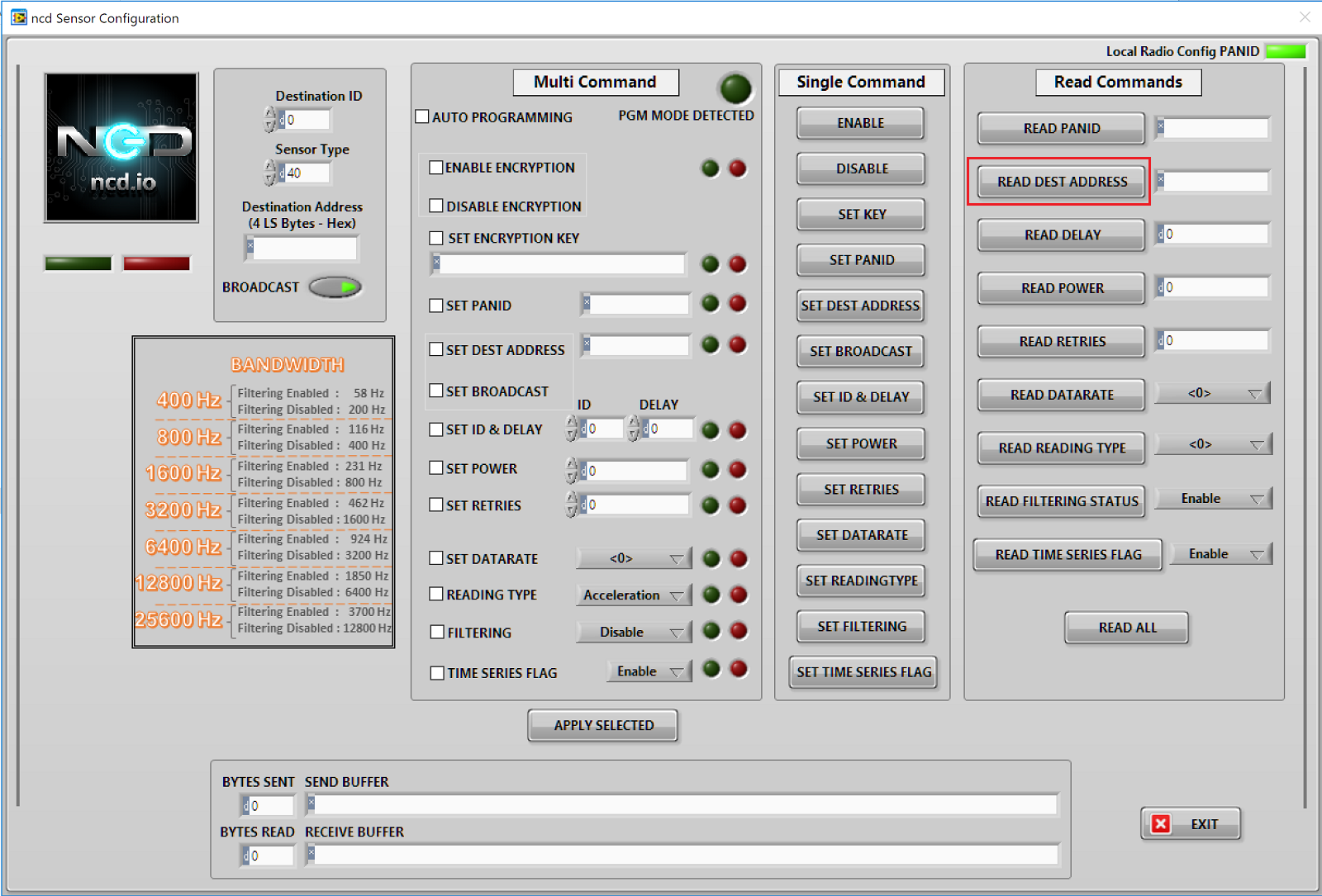
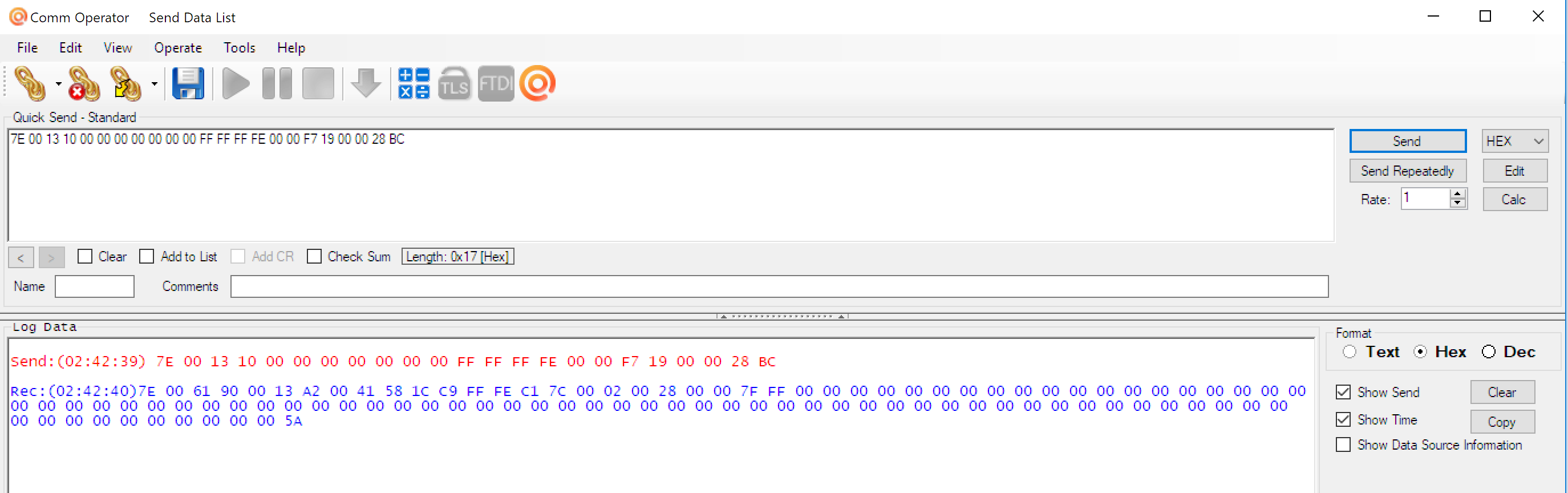
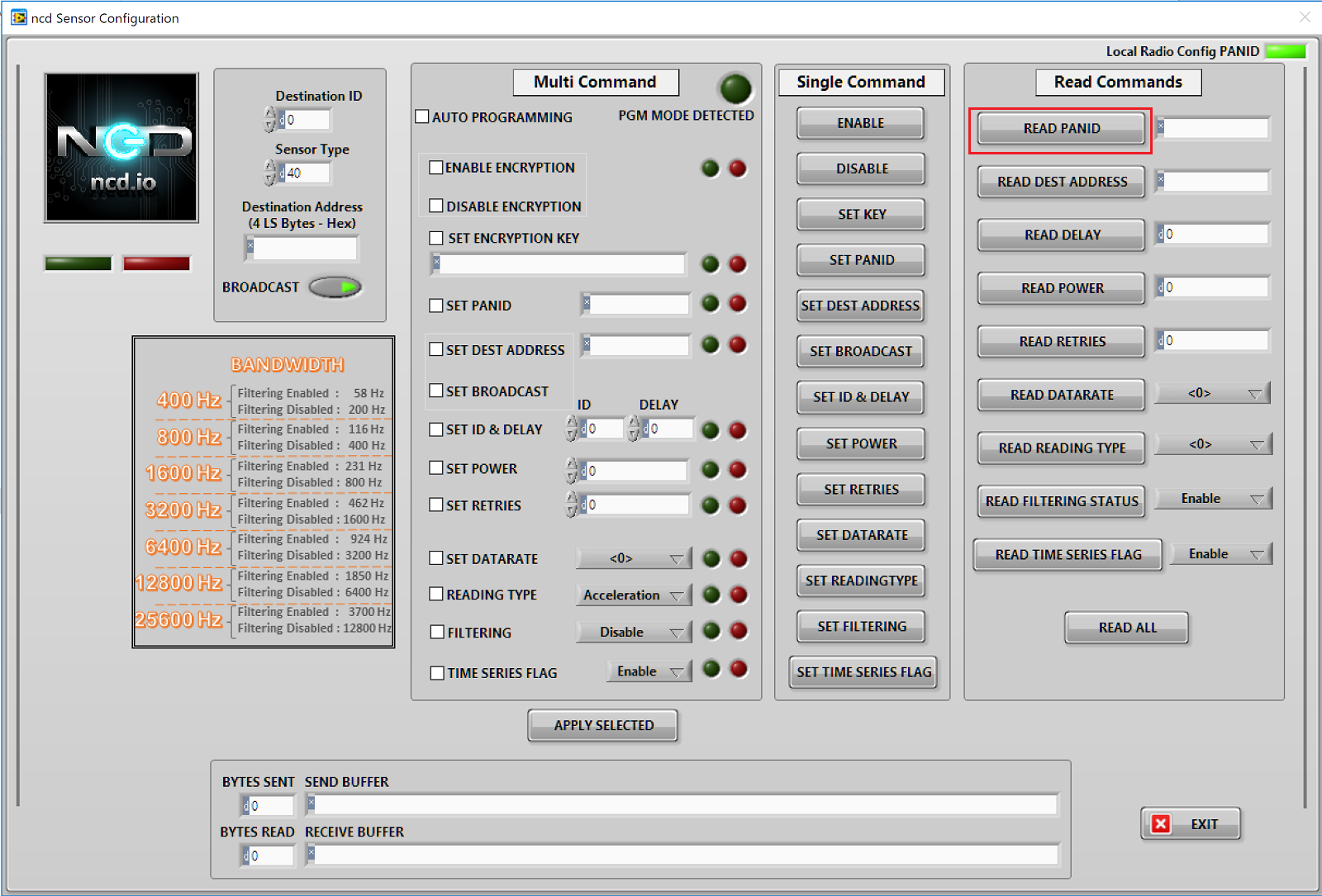
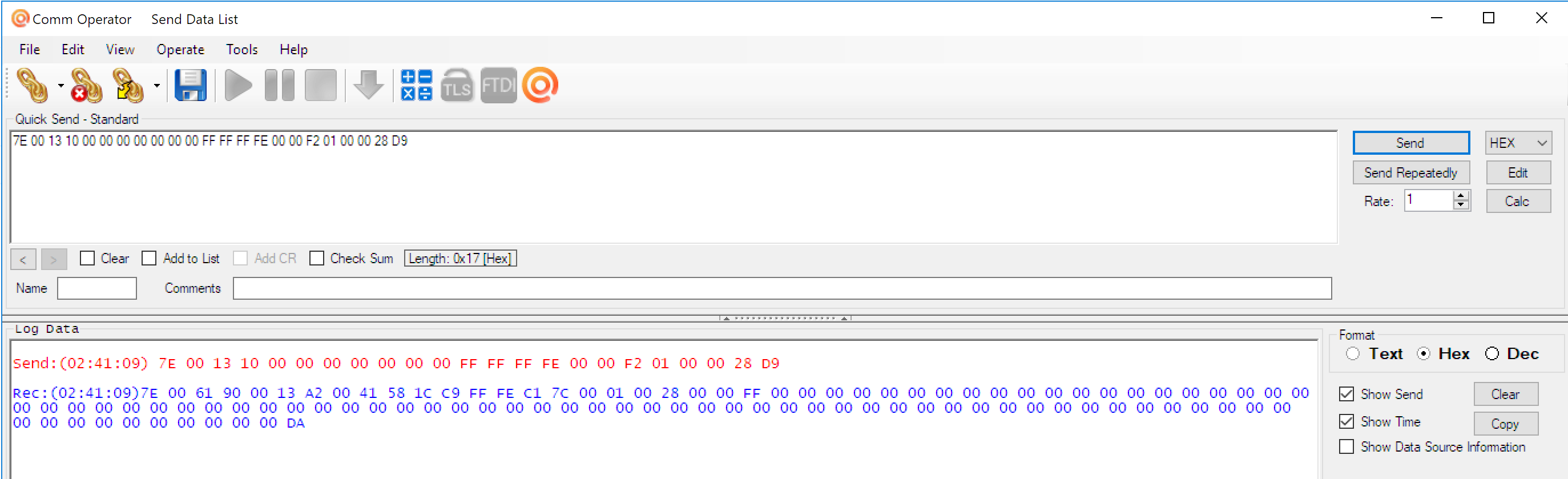
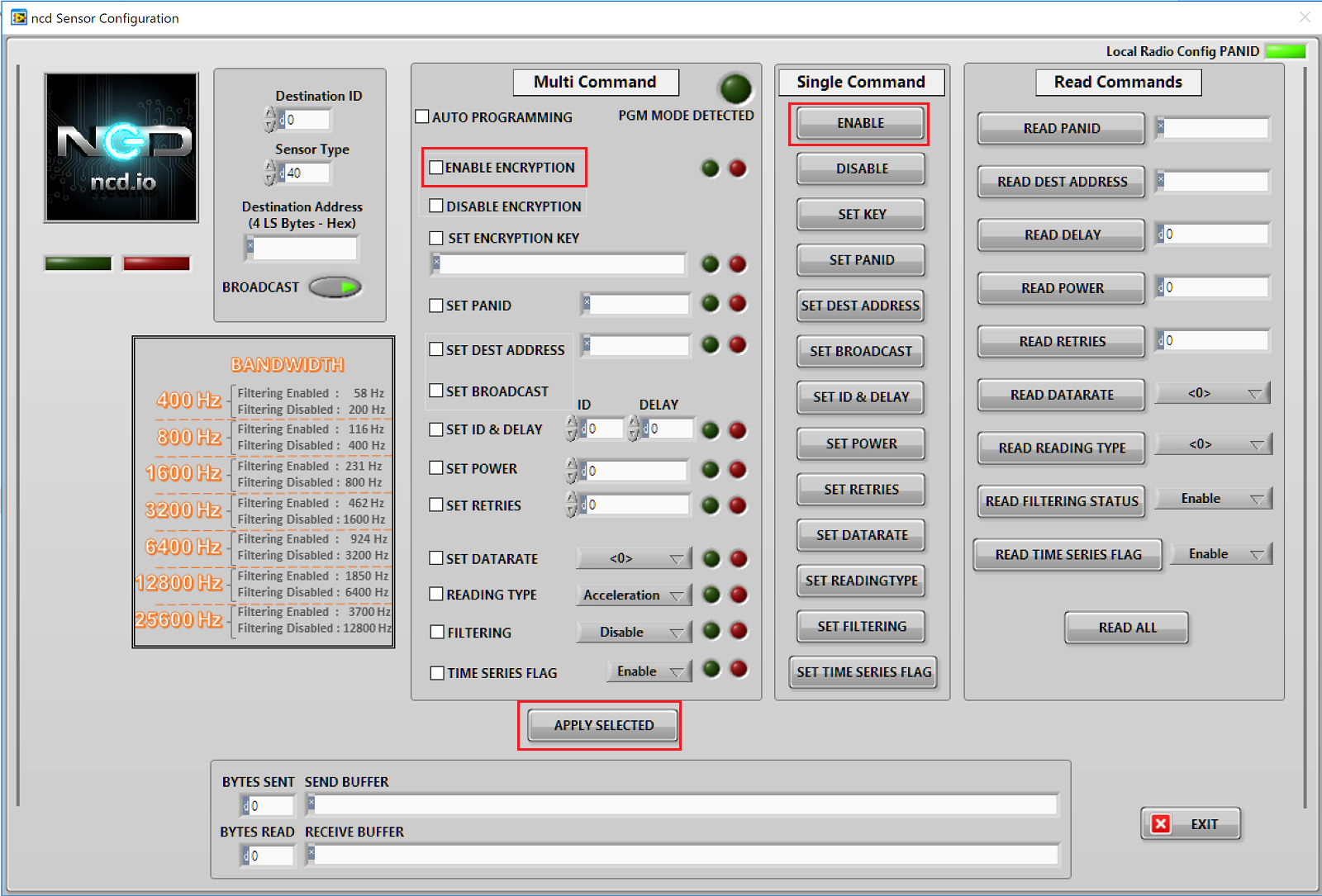
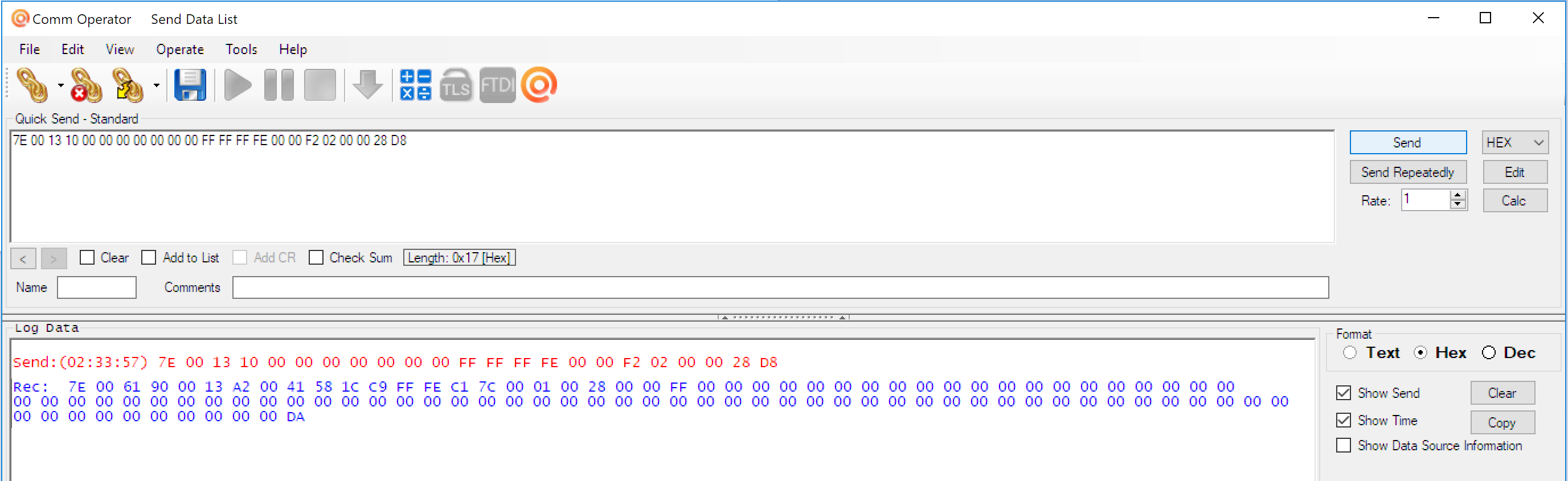
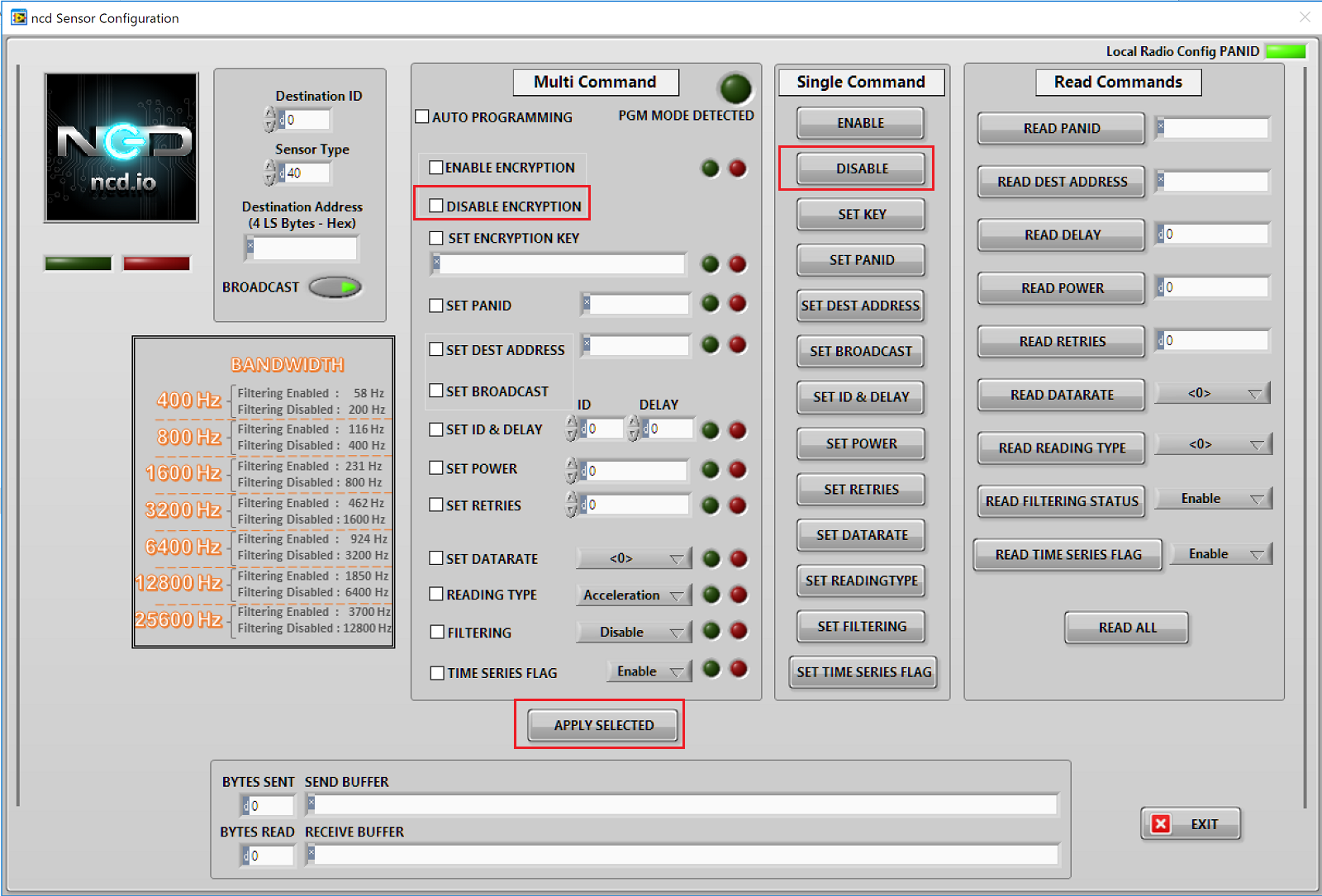
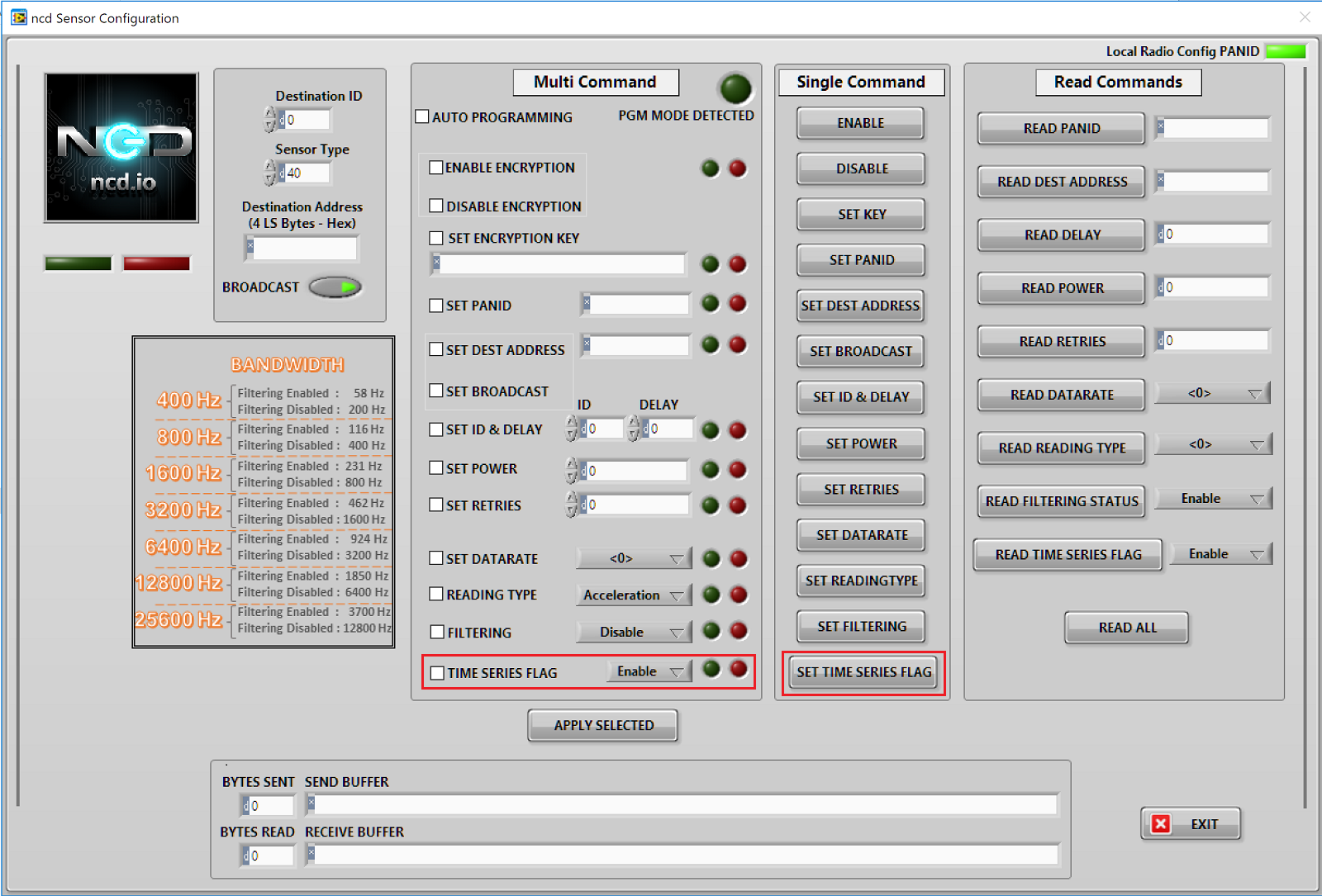
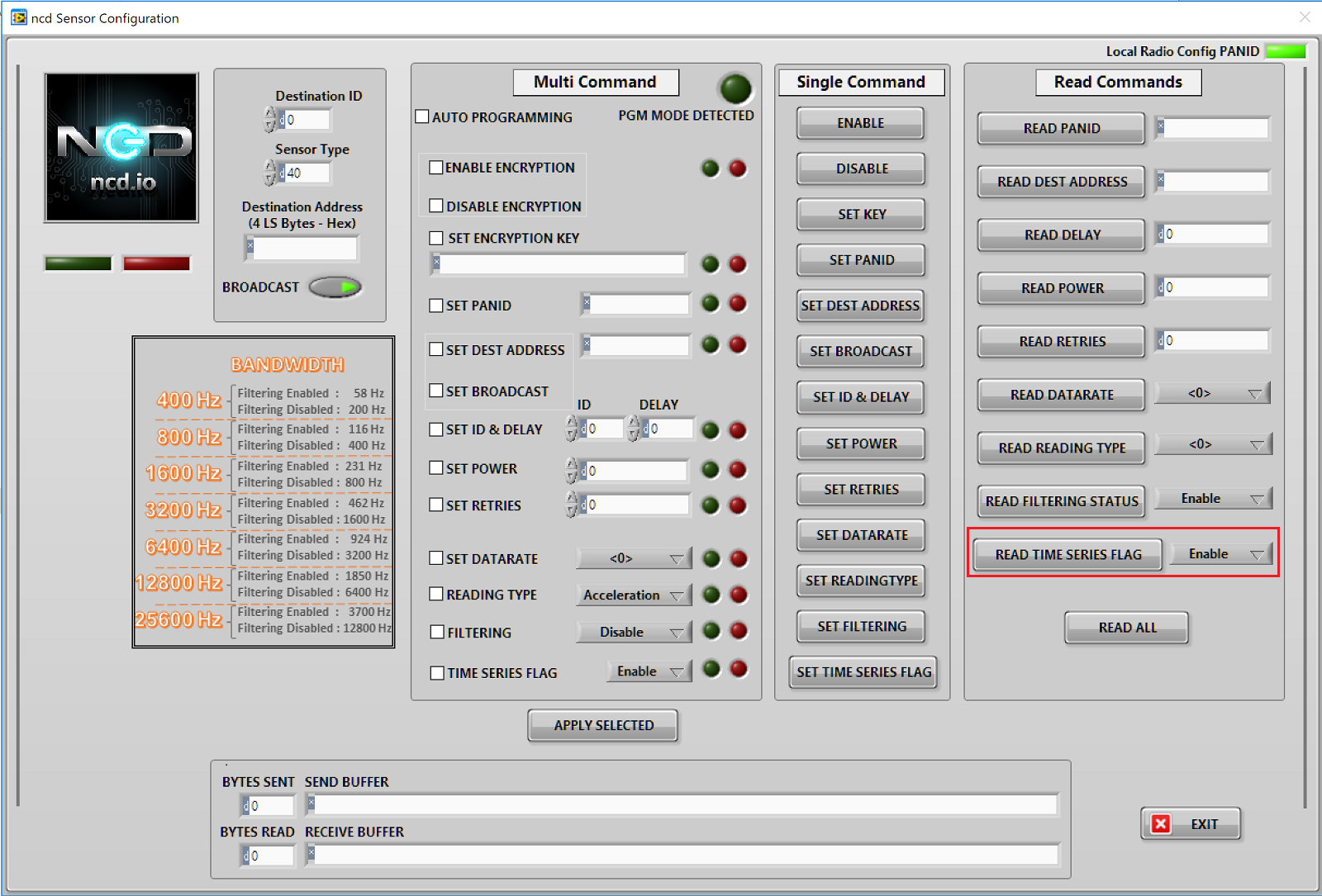
With an open communication protocol this sensor can be integrated with just about any control system or gateway. Data can be transmitted to a PC, a Raspberry Pi, to Microsoft Azure® IoT, or Arduino. Sensor parameters and wireless transmission settings can be changed on the go using the open communication protocol providing maximum configuration depending on the intended application.
The range, price, accuracy, battery life and security features of Enterprise Wireless Vibration Sensor makes it an affordable choice which exceeds the requirements for most of the Industrial as well as consumer market applications.