Introducing NCD’s IoT Wireless Impact Detection Sensor, boasting up to a 28 Mile range using a 900MHz wireless mesh networking architecture or 1 Mile using 2.4GHz wireless mesh networking architecture. It incorporates a STMicro LIS3DH acceleration sensor for measuring acceleration changes. Utilizing the interrupt feature of this sensor, it is able to minimize power consumption by making most of the components go to sleep while waiting for the interrupt from the sensor.
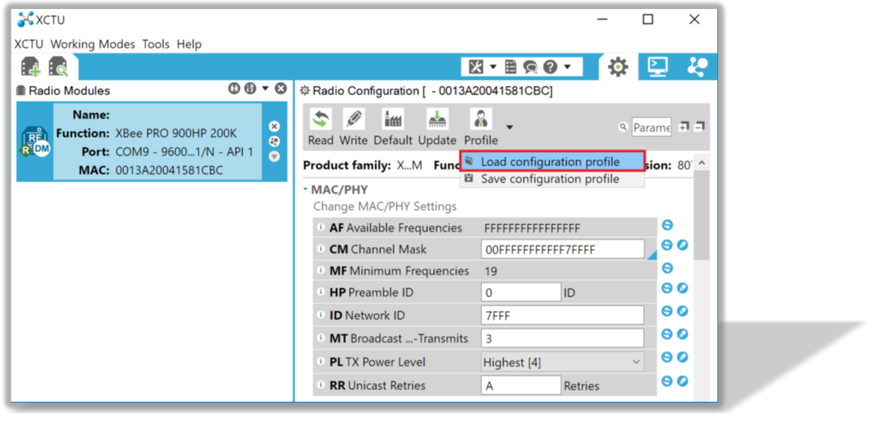
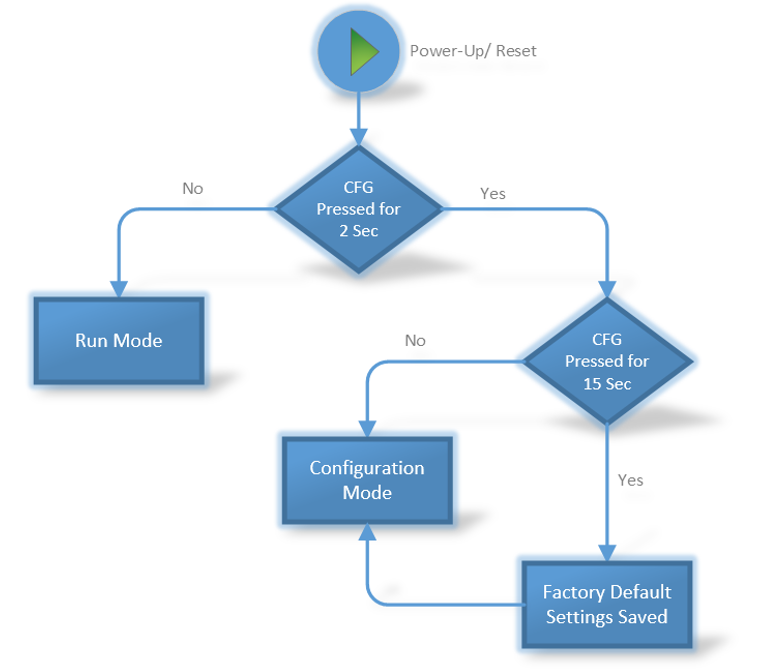
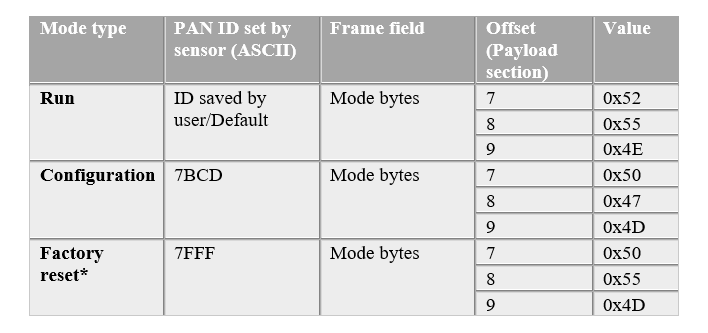
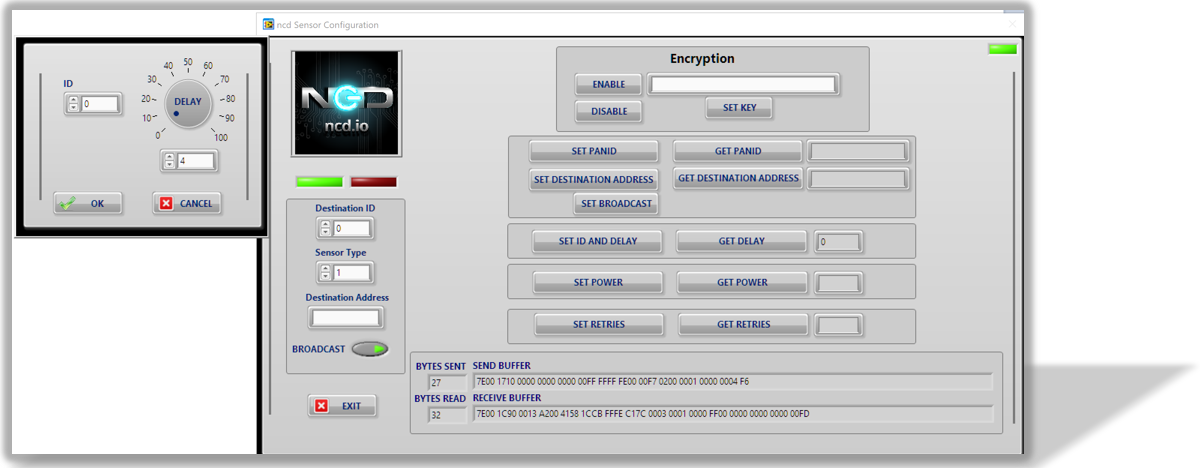
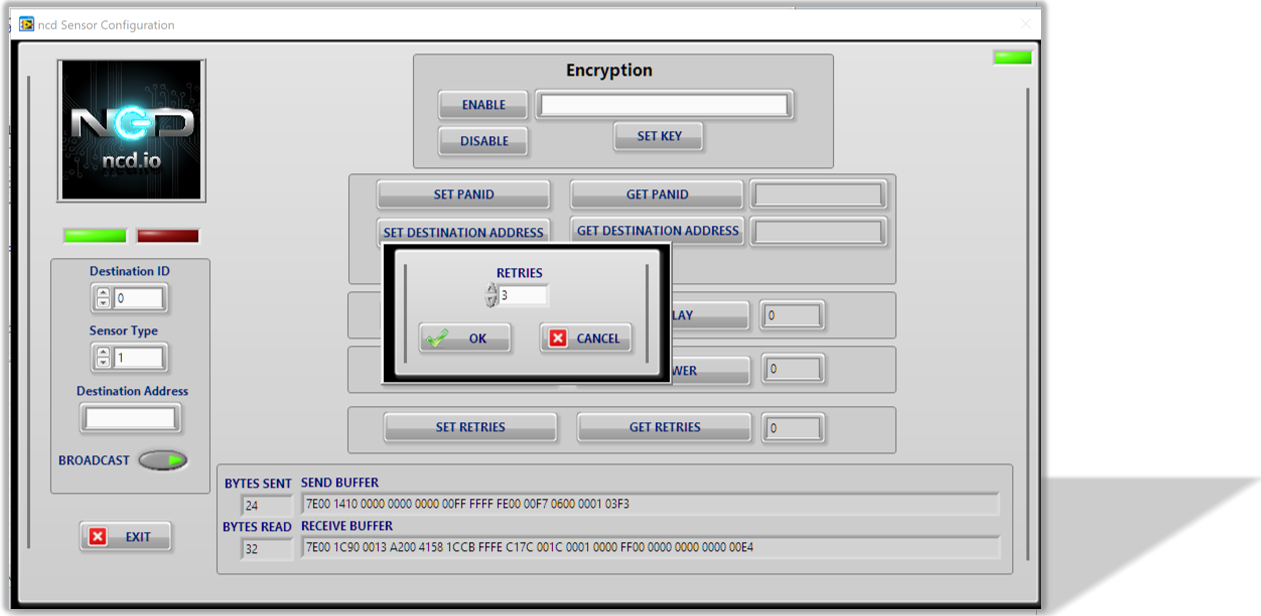
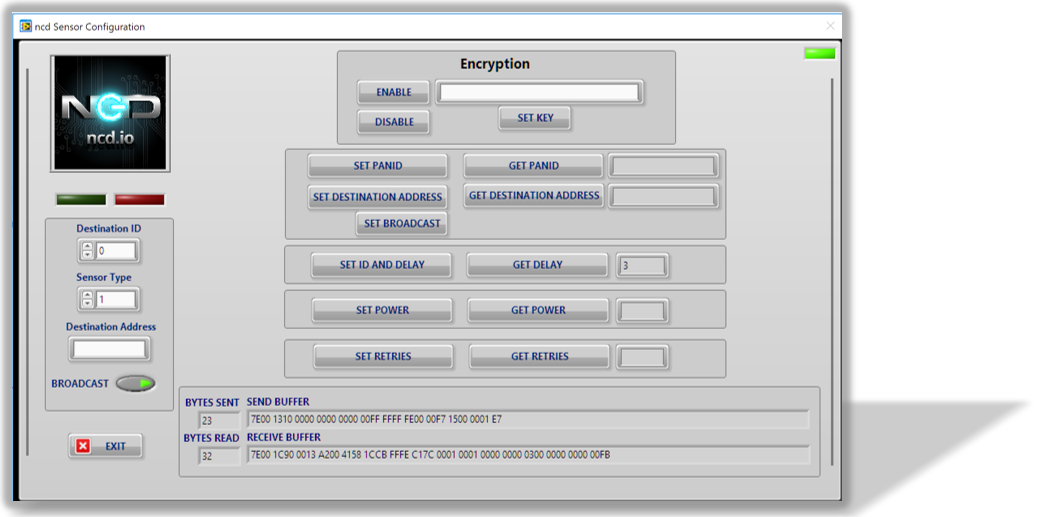
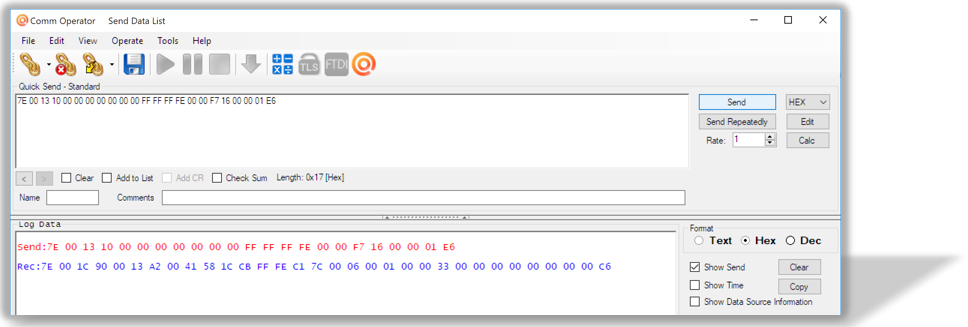
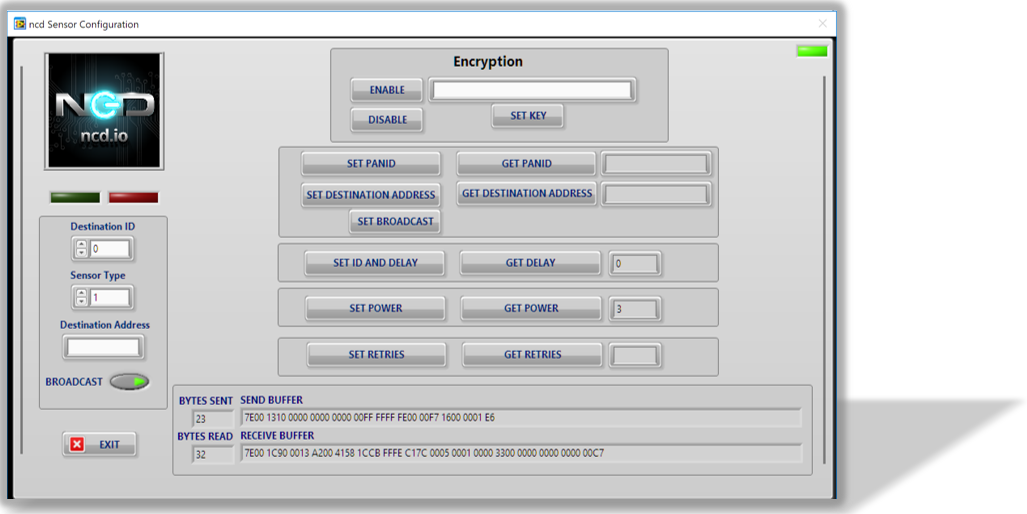
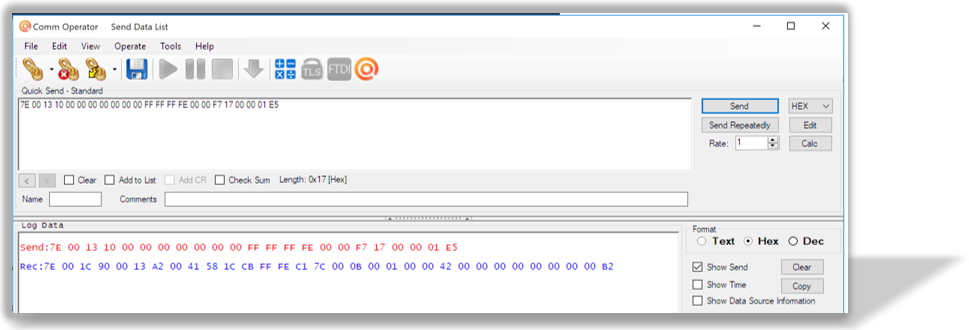
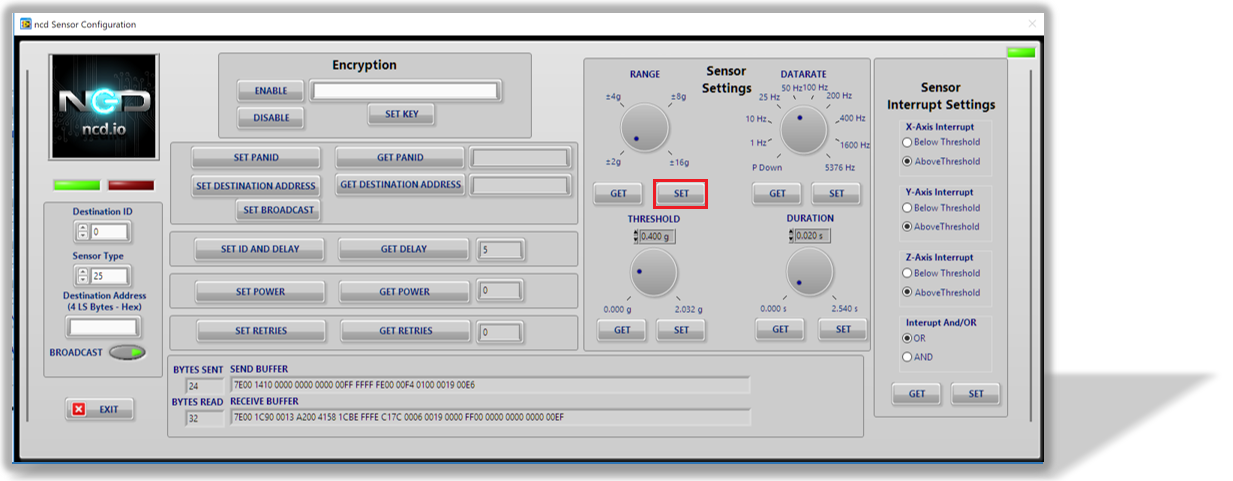
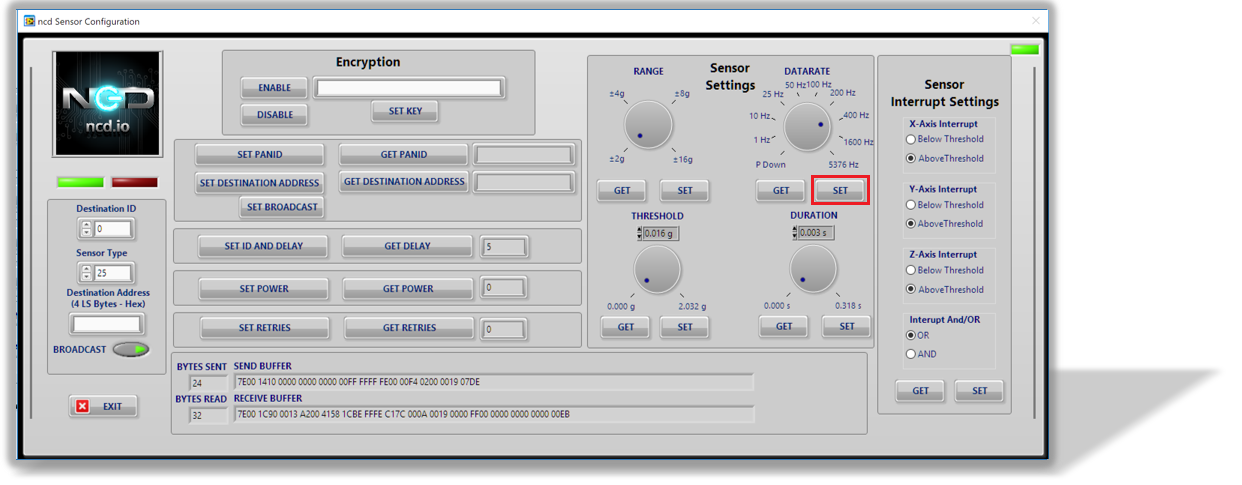
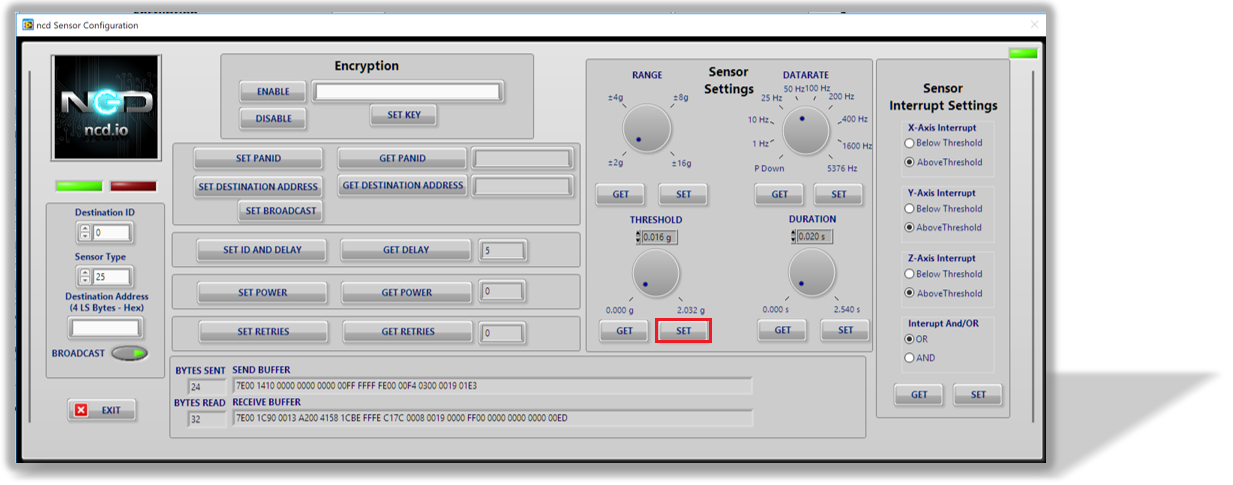
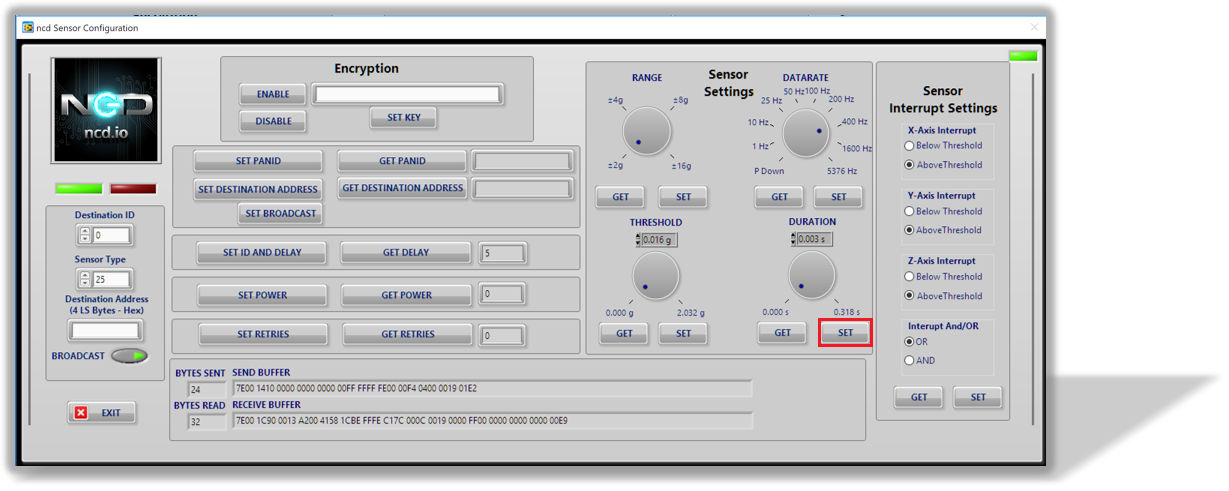
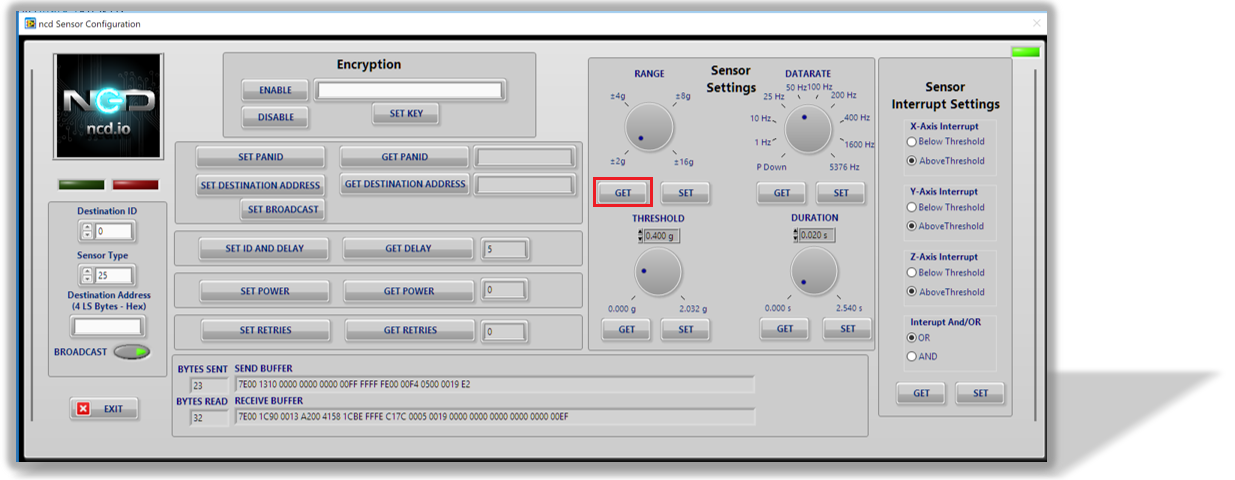
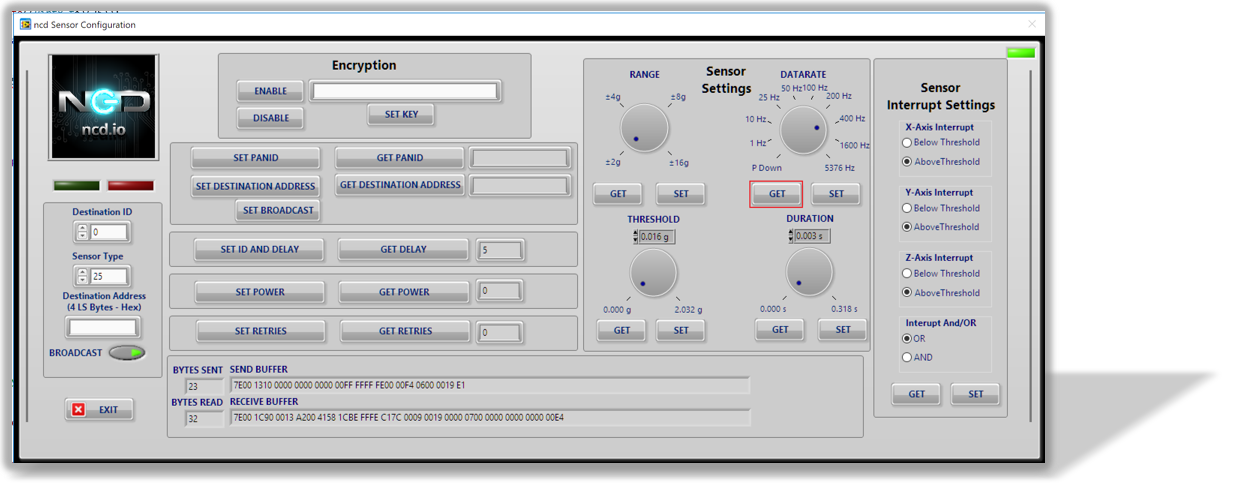
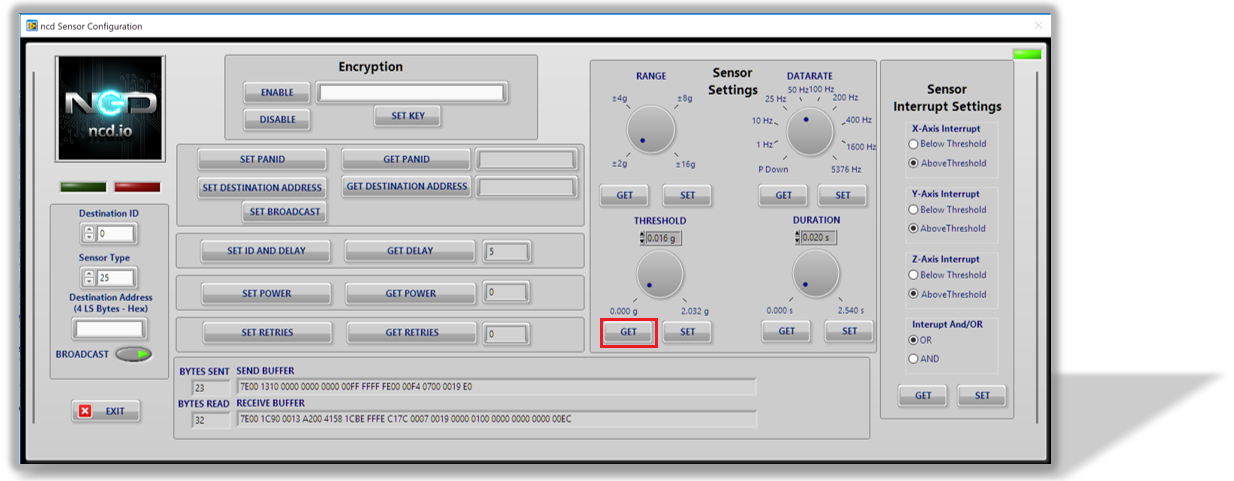
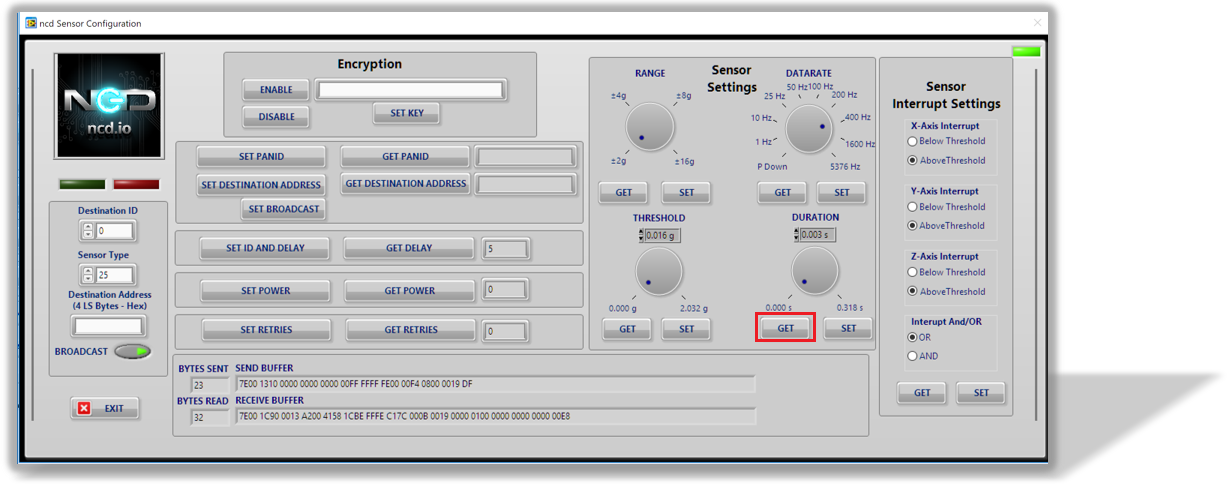
User can configure the Impact Detection condition (interrupt settings) using the configuration mode. User can configure acceleration range, data rate, interrupt duration and interrupt threshold. Interrupt duration is dependent upon data rate. It is the duration for which an interrupt condition has to hold to generate a system interrupt and initiate data transmission to a nearby receiver. Interrupt threshold is dependent upon acceleration range and it is the acceleration in g which if exceeded causes interrupt to fire. Note that the absolute value of actual g reading is compared with it therefore it works for both positive and negative acceleration exceeding threshold.
Interrupts are fired only when the acceleration (absolute value) read form the sensor exceeds the threshold in the positive direction. All interrupts are combined with an OR gate. This allows impact detection (system interrupt) if an interrupt occurs for any axis (OR condition). User can also configure a delay time in seconds which disables the interrupt for that amount of time after a successful interrupt. This enables the user to make sure that the sensor does not drain its battery (with continuous transmissions) if an interrupt condition persists or a wrong condition is accidently programmed. This time is also used to send a periodic packet to a receiver with latest available data.
The device also sends two extra samples with the sample which caused interrupt. This enables the user to have a history of acceleration data prior and after the interrupt. In normal scenario, it will send 1 sample (n-1) prior to the interrupt sample (n) and 1 sample after the interrupt (n+1). However, if the data rate is too slow, the sensor does not wait for n+1 packet to arrive so as to save battery and instead sends 2 old samples (n-2, n-1) along with the third sample (n) which fired interrupt. It may happen that the duration and sleep delay combination is such that no old sample was saved after the last interrupt and at the time of interrupt the device may contain only 1 sample. In that case it sends 2 old samples from the last transmission along with third sample (n) being the interrupt sample. In case it has 1 old sample (n-1) and 1 interrupt sample (n), it will send the first sample (n-2) from the previously transmitted data.
Powered by just 2 AA batteries and an operational lifetime of 500,000 wireless transmissions, a 10 years battery life can be expected depending on environmental conditions and the data transmission interval. Optionally, this sensor may be externally powered.
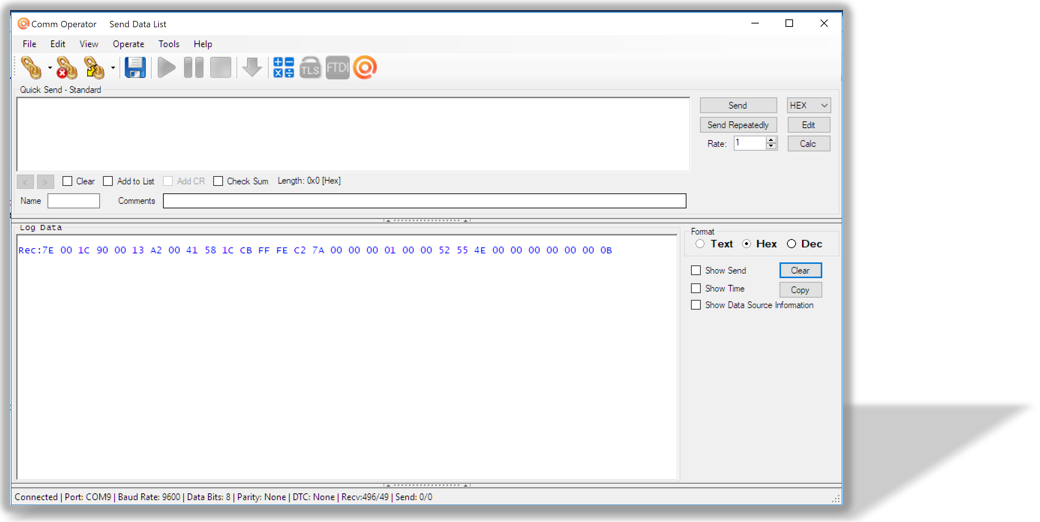
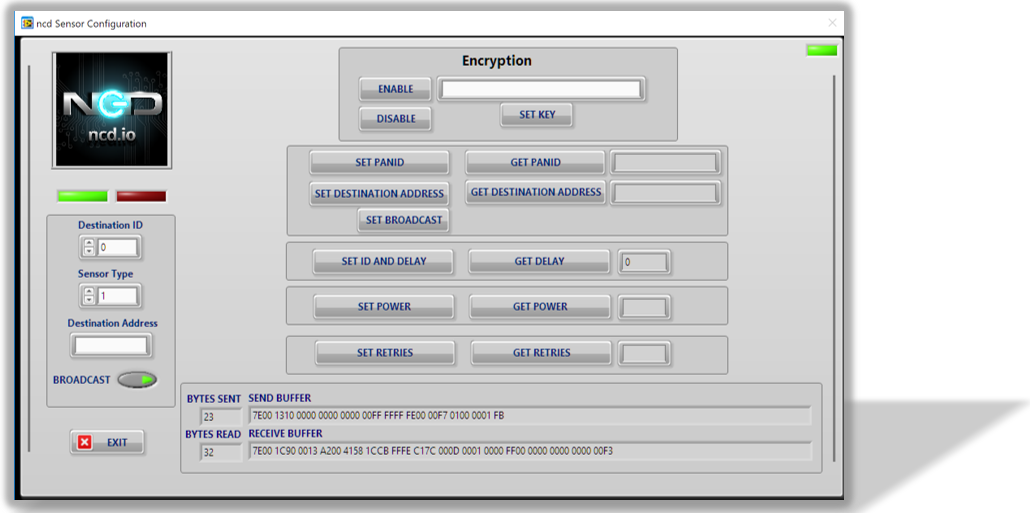
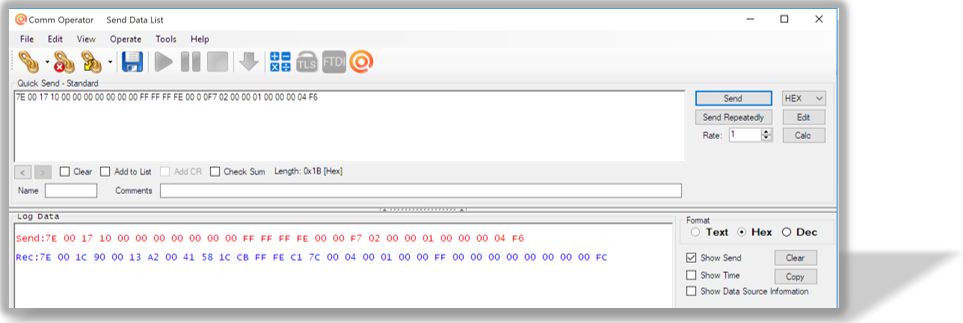
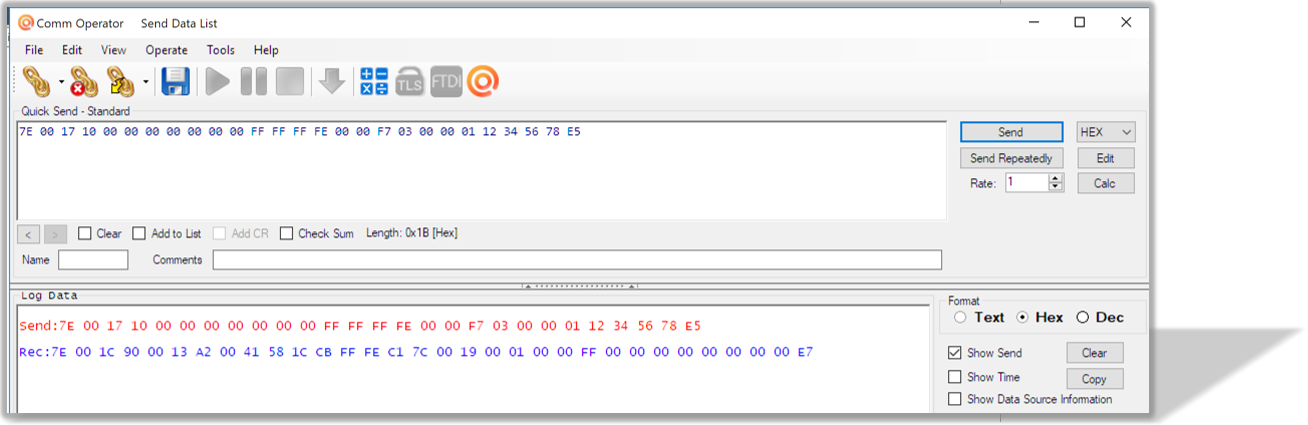
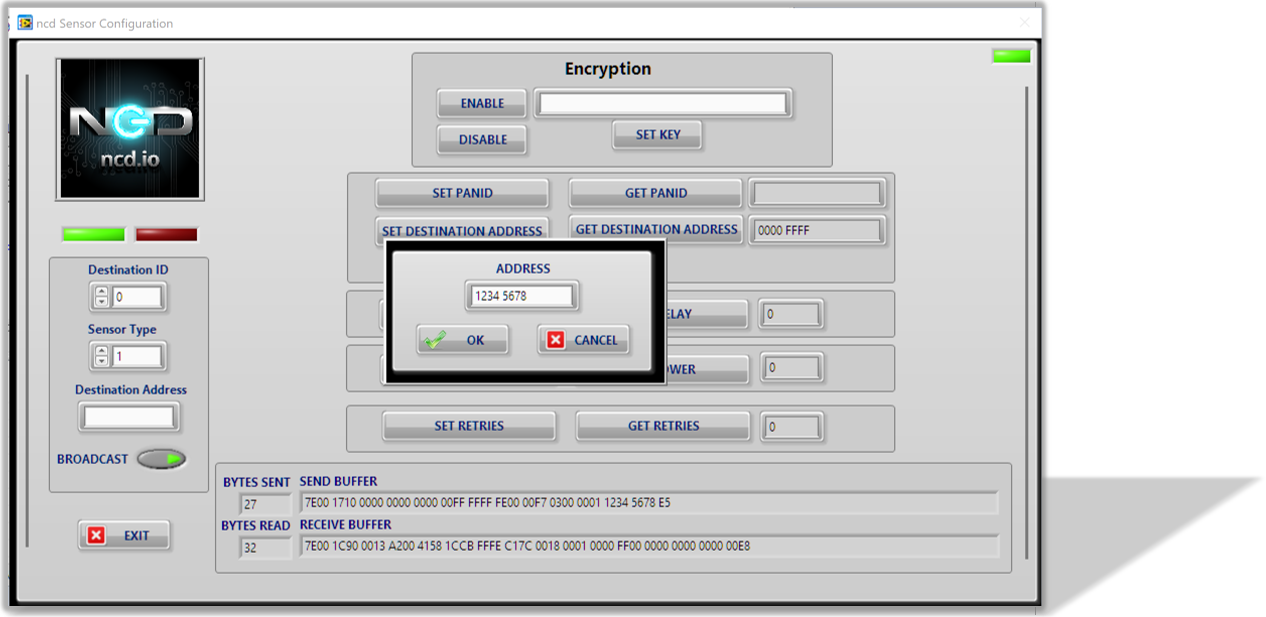
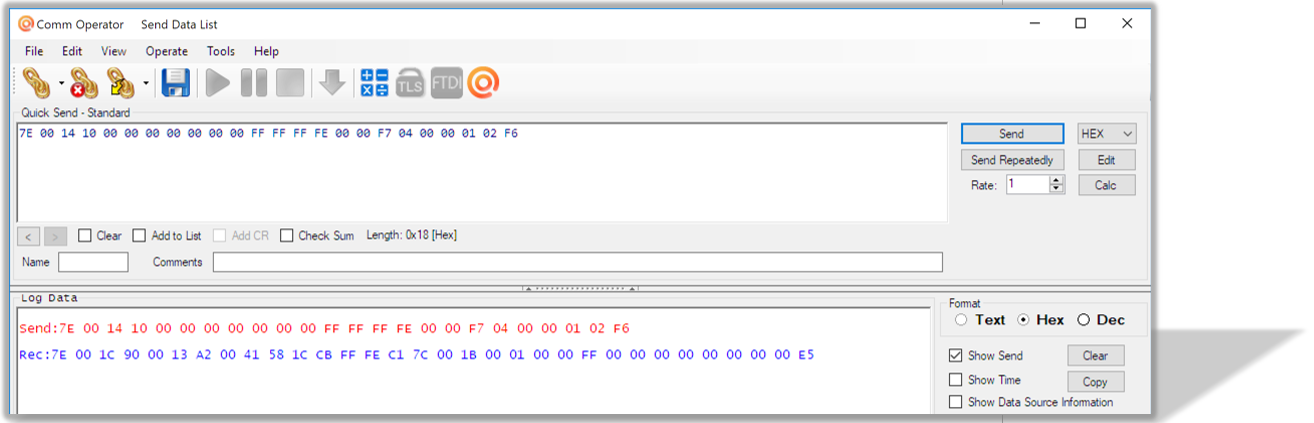
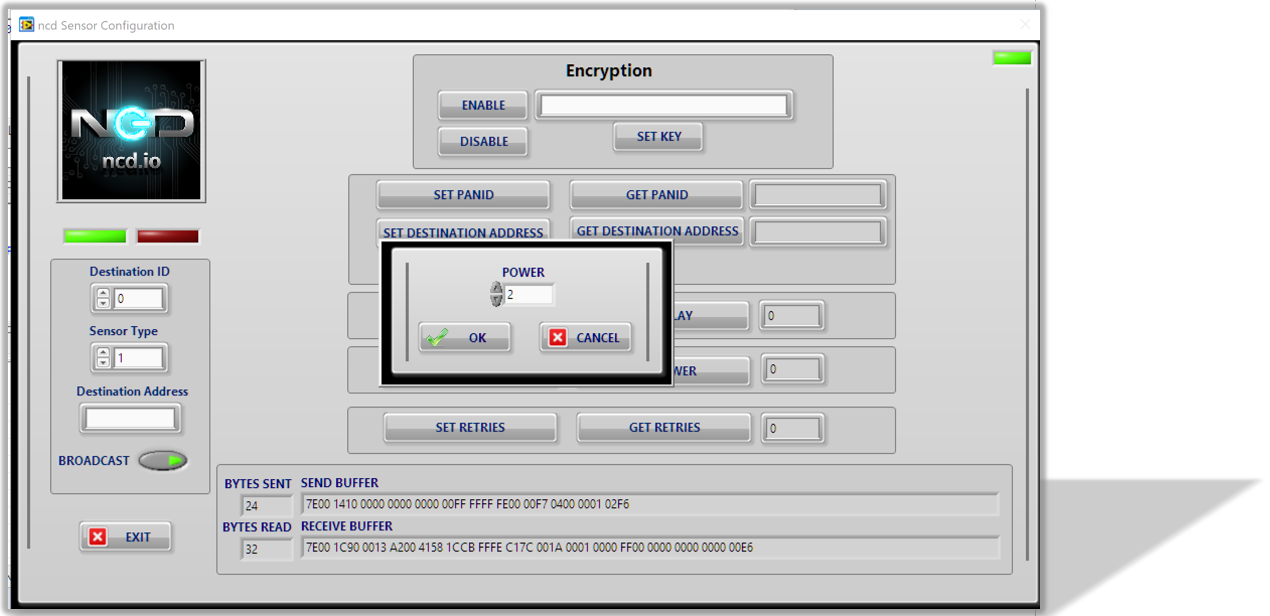
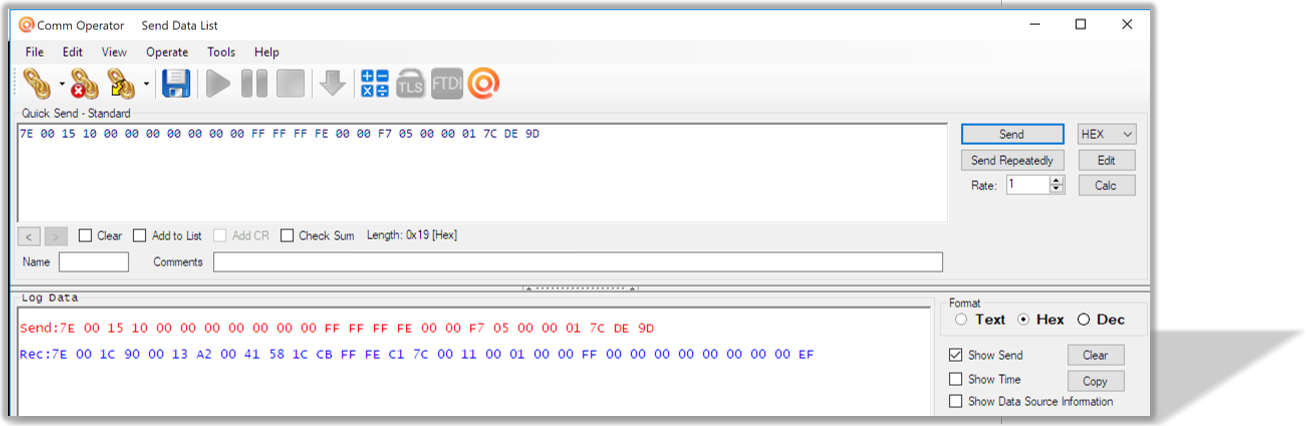
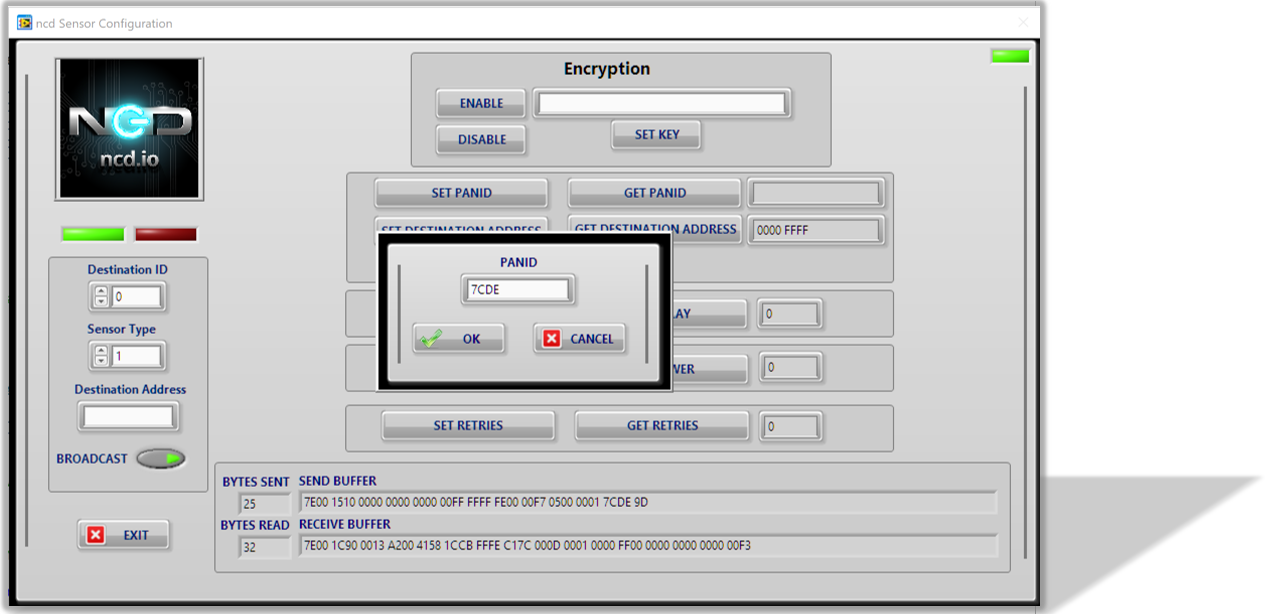
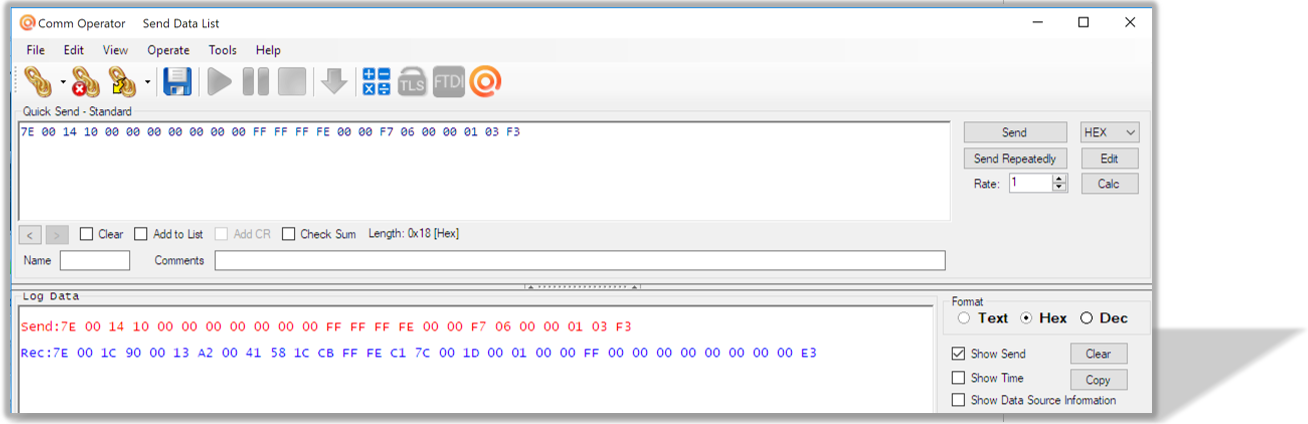
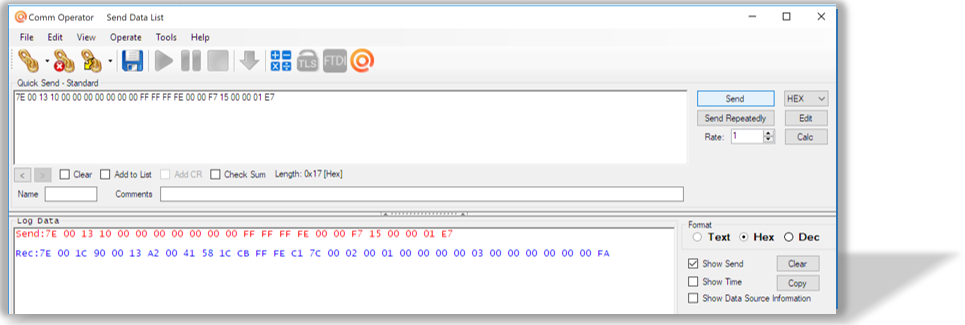
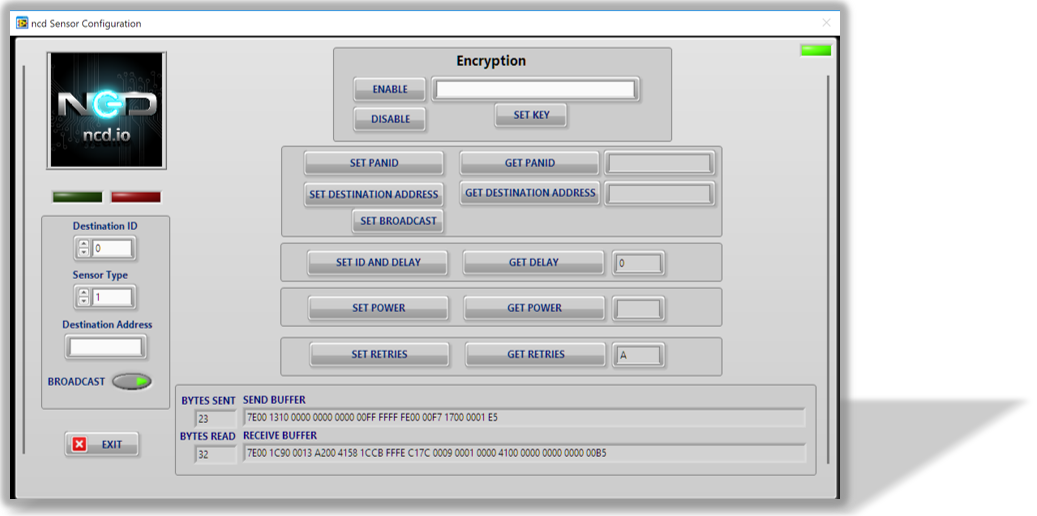
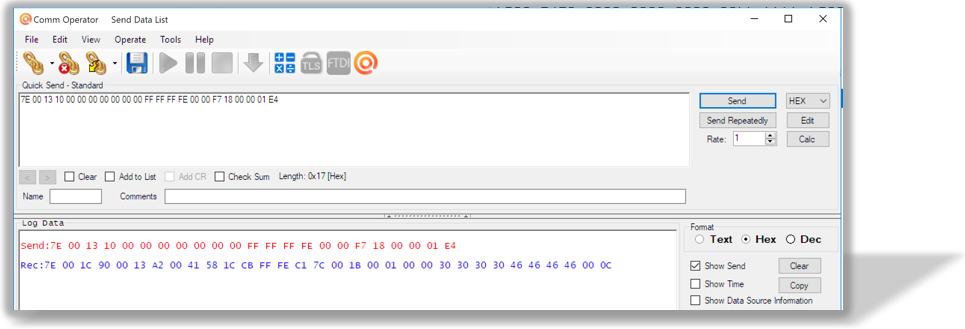
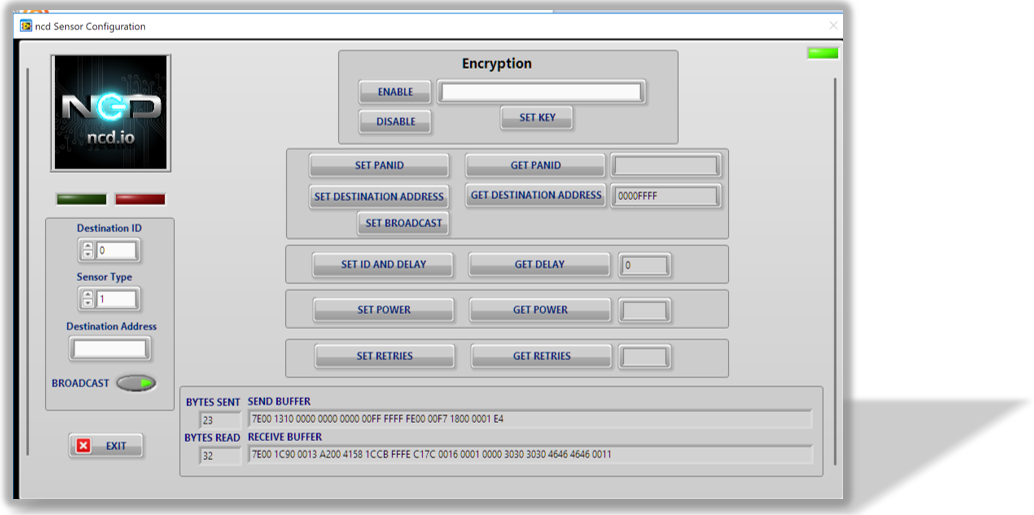
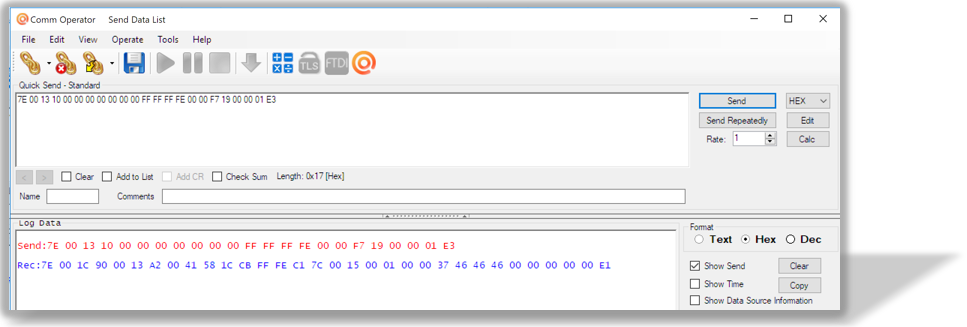
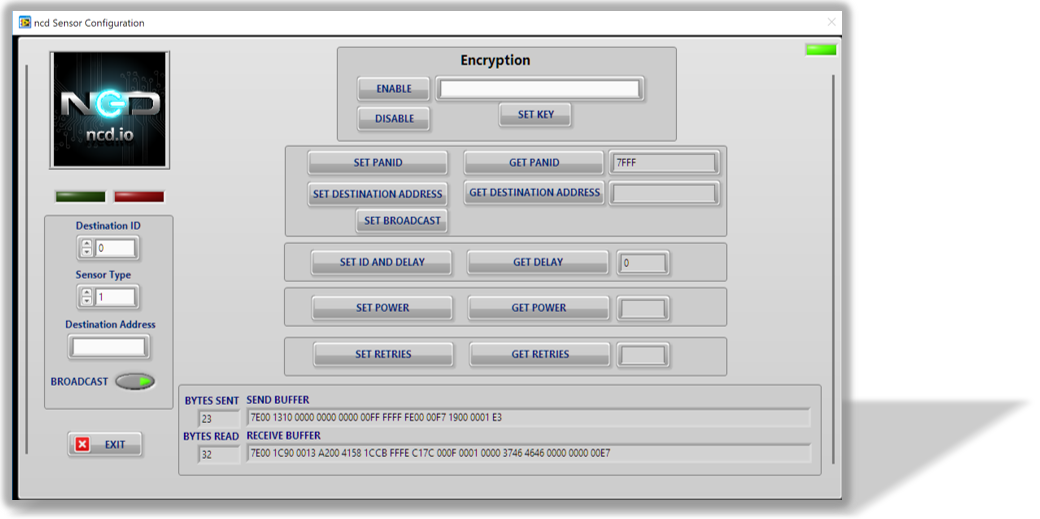
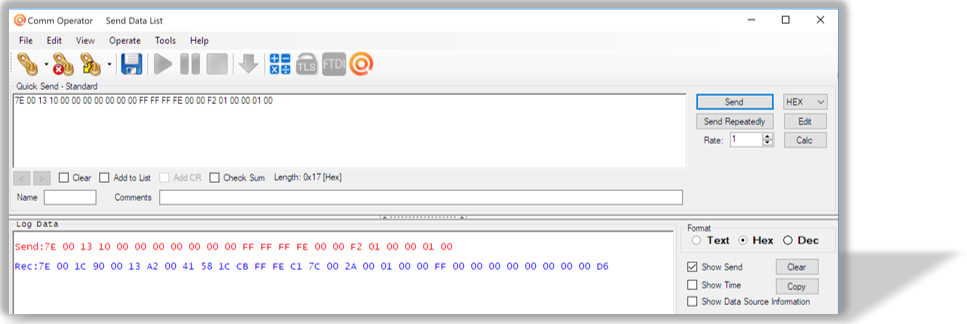
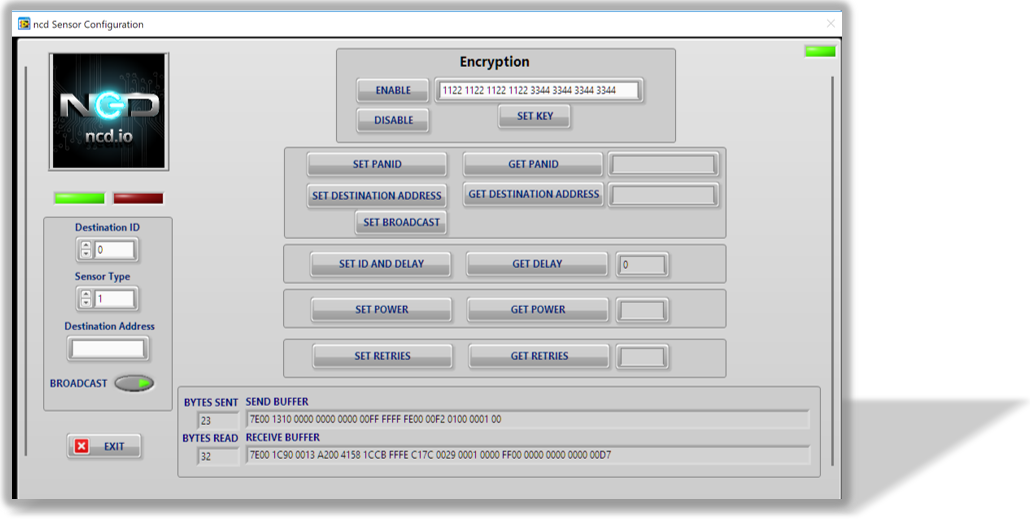
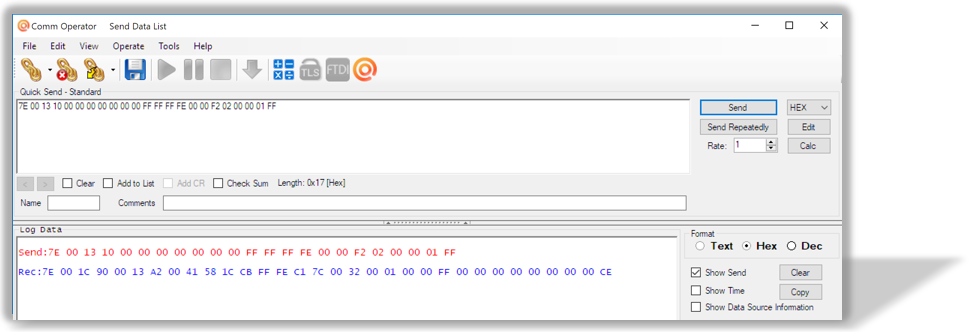
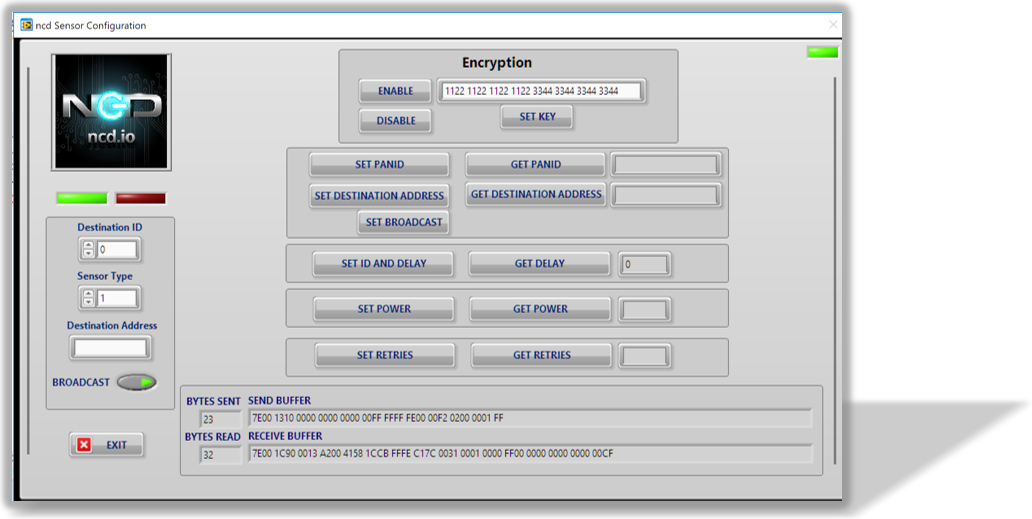
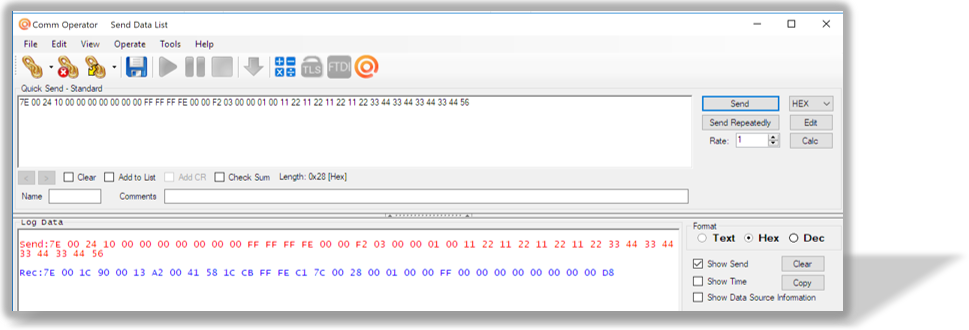
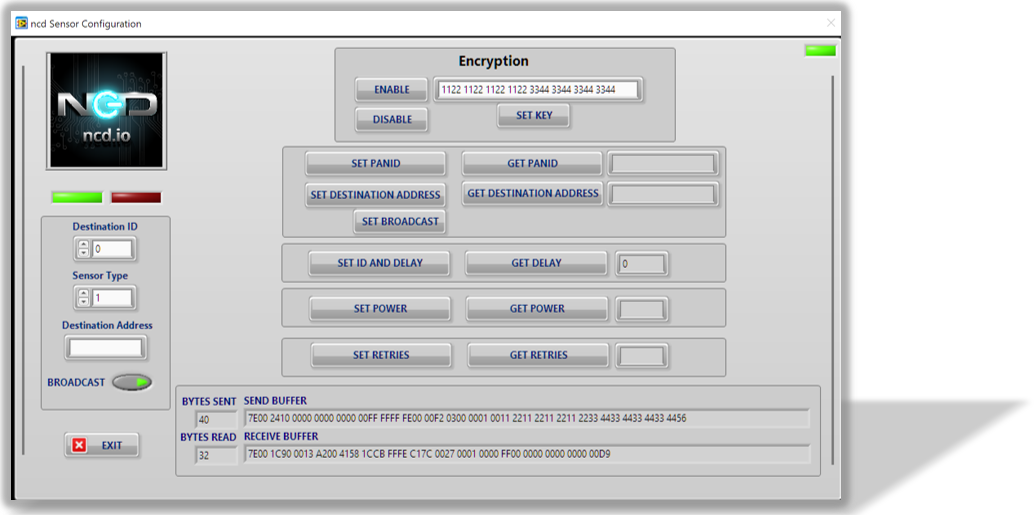
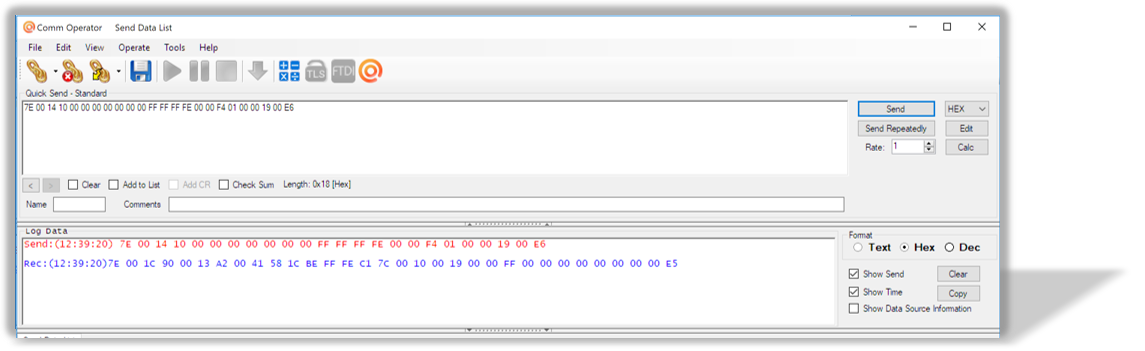
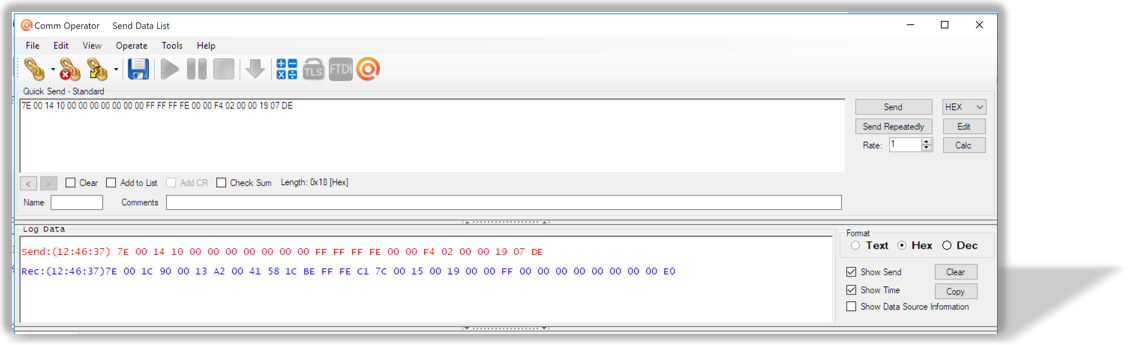
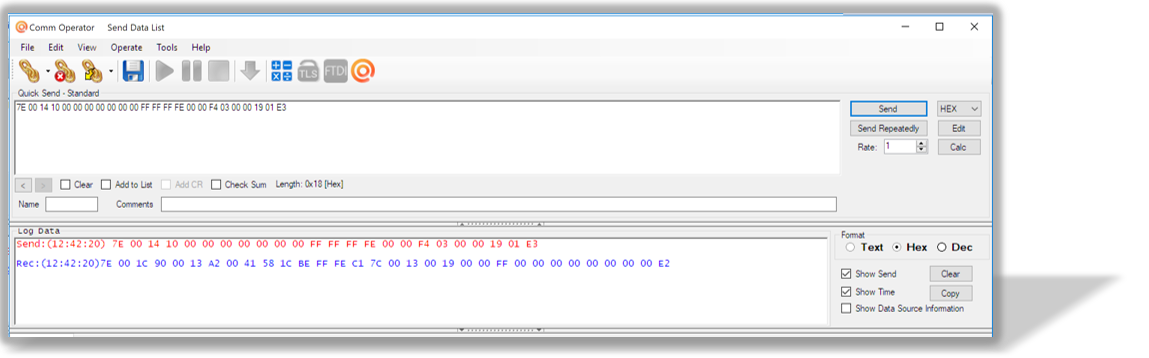
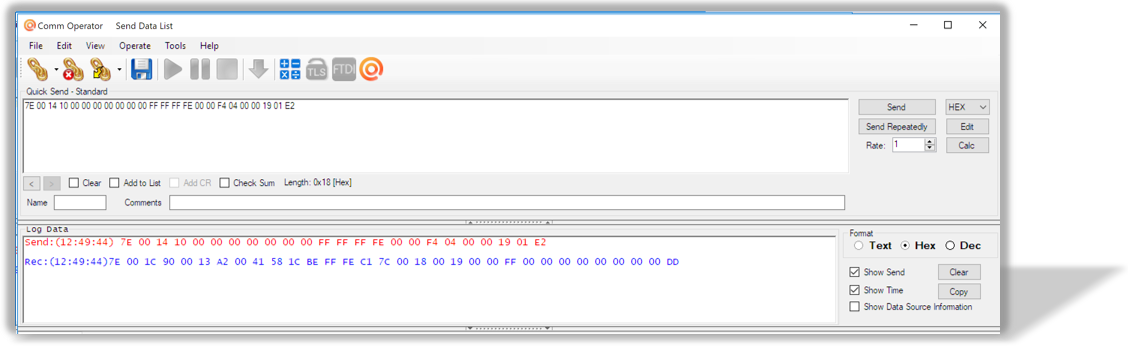
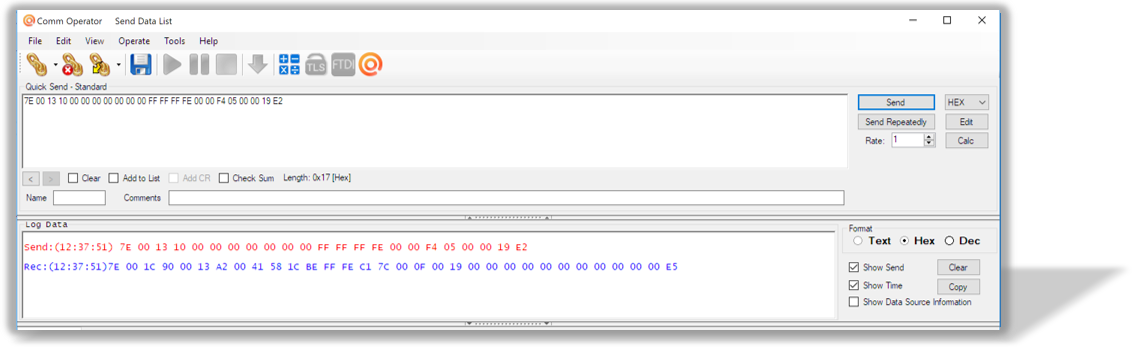
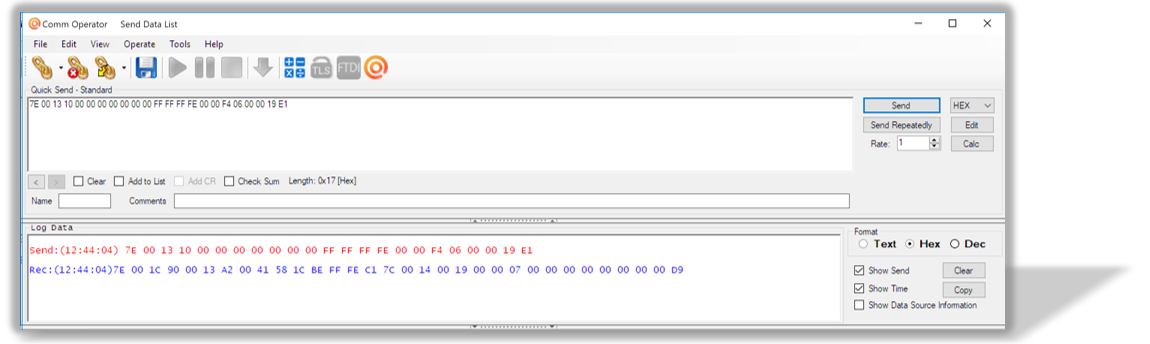
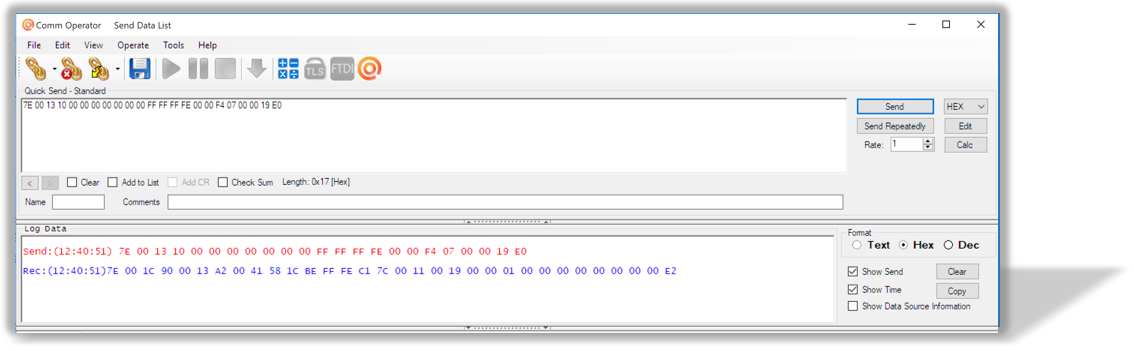
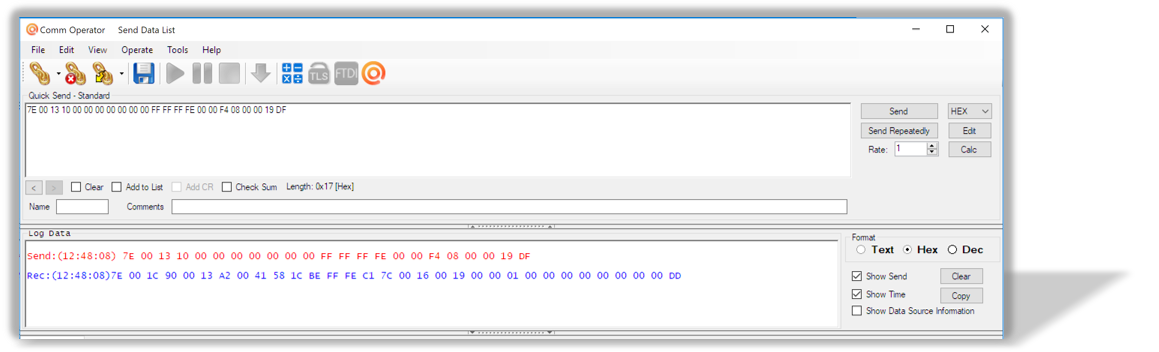
With an open communication protocol this sensor can be integrated with just about any control system or gateway. Data can be transmitted to a PC, a Raspberry Pi, to Microsoft Azure® IoT, or Arduino. Sensor parameters and wireless transmission settings can be changed on the go using the open communication protocol providing maximum configurability depending on the intended application.
The range, price, accuracy, battery life and security features of Wireless Impact Detection Sensor makes it an affordable choice which exceeds the requirements for most of the industrial as well as consumer market applications.