Introducing NCD’s Long Range Industrial IoT Wireless Ultrasonic Tank Level Sensor, boasting up to a 2 Mile range using a wireless mesh networking architecture. Incorporating the Ultrasonic proximity detection sensor sensors, this wireless IoT Ultrasonic Tank Level Sensor transmits highly accurate tank level or distance values at user-defined intervals. The Ultrasonic sensor features 1mm resolution.
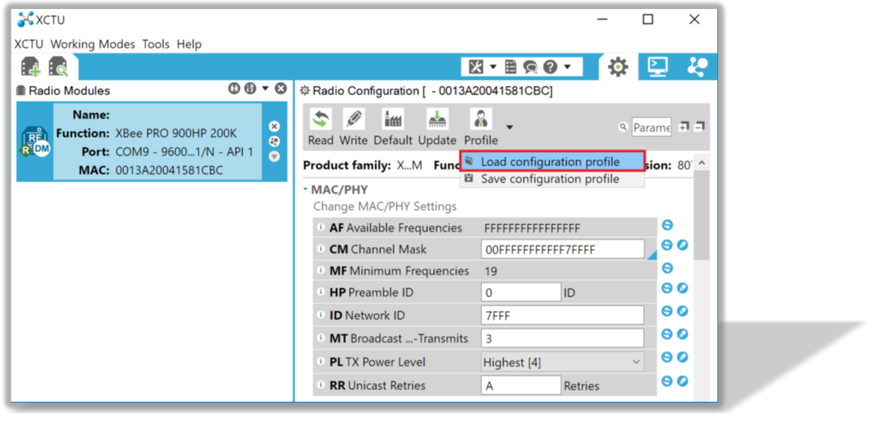
With an open communication protocol, this IoT wireless Ultrasonic Tank Level Sensor for distance, Level measurement can be integrated with just about any control system or gateway. Data can be transmitted to a PC, a Raspberry Pi, to Microsoft Azure® IoT, Amazon AWS, Losant, and MQTT servers or to local Arduino processors for special handling. Sensor parameters and wireless transmission settings can be changed using an open communication protocol providing maximum configurability depending on the intended application.
Applications requiring 100% reading-to-reading reliability should not use Ultrasonic Tank Level Sensor at a distance closer than 50cm. Although most users find Ultrasonic Tank Level Sensor to work reliably from 0 to 50cm for detecting objects in many applications, although its not guaranteed operational reliability for objects closer than the minimum reported distance. Because of ultrasonic physics, these sensors are unable to achieve 100% reliability at close distances.
The long range, price, accuracy, battery life and security features of Long Range Wireless Ultrasonic Tank Level Sensor for Air Quality Monitoring makes it an affordable choice which exceeds the requirements for most of the industrial as well as consumer market applications.
The Ultrasonic Tank Level sensor line provides high accuracy and high resolution ultrasonic proximity detection and ranging in air. This sensor line features 1-mm resolution, target-size and operating-voltage compensation for improved accuracy, superior rejection of outside noise sources, internal speed-of-sound temperature compensation and optional external speed-of-sound temperature compensation. The Ultrasonic Tank Level sensor models are available
in 1.5-meter, 5-meter, or 10-meter models. This ultrasonic sensor detects objects from 1-mm and ranges to objects from 30-cm* to maximum range. Objects closer than 30-cm* are typically reported as 30-cm*.
A range value of 5000 or 9999 corresponds to no target being detected in the field of view.