CO2 Measurement Accuracy ± (60 ppm + + 5% of reading)(25 °C, 400 – 2’000 ppm)
Repeatability 10 ppm And Temperature stability
NDIR measurement principle
Temperature compensation of CO2 sensor signal
Fully calibrated and linearized
Built-in reference channel
Superior long-term stability
Industrial Grade Sensor with 0 to 90% RH / -25°C [-13°F] to 85°C [185°F])
Resolution 0.4% RH/0.1°C Accuracy 6% RH/ 0.8°C
Includes Battery Level with Every Transmission
Validates and Retries Lost Communication Packets
Encrypted Wireless Communications up to 2 Mile Range
Send IoT Data to PCs, Amazon AWS, Microsft Azure, and MQTT Servers
Operating temp range -40’C to 80′
Applications
In House Temperature Humidity monitoring
Hospital Air quality monitoring
HVAC application
Storage Unit Weather Monitoring System
Warehouse Health Monitoring System
Component of Low Power IoT System
Home Automation
Description
Introducing NCD’s Long Range Industrial IoT Wireless CO2 Temperature Humidity Sensor for Air Quality Monitoring with an integrated temperature humidity sensor, boasting up to a 2 Mile range using a wireless mesh networking architecture. Incorporating the SCD30 and SHT30 temperature humidity sensors, this wireless IoT sensor transmits highly accurate CO2 Concentration, temperature and humidity samples at user-defined intervals.
CMOSens® Technology for IR detection enables highly accurate carbon dioxide measurement at a competitive price. Along with the NDIR measurement technology for CO2 detection, a best-in-class humidity and temperature sensor is also integrated on the same sensor module. Ambient humidity and temperature can be outputted by Sensors’s algorithm expertise through modeling and compensating of external heat sources without the requirement for any additional components.
Thanks to the dual-channel principle for the measurement of carbon dioxide concentration, the sensor compensates for long-term drifts automatically by design. The very small module height allows easy integration into different applications.
The on-board temperature sensor is rated for -25°C to 85°C or -13°F to 185°F and the humidity sensor is rated for 0 to 100% RH (non condensing). Powered by just 4 AA batteries and an operational lifetime of 300,000 wireless transmissions, a 10 years battery life can be expected depending on environmental conditions and the data transmission interval. An external power supply is supported by special request.
With an open communication protocol, this IoT wireless CO2 Temperature Humidity Sensor for Air Quality Monitoring can be integrated with just about any control system or gateway. Data can be transmitted to a PC, a Raspberry Pi, to Microsoft Azure® IoT, Amazon AWS, Losant, and MQTT servers or to local Arduino processors for special handling. Sensor parameters and wireless transmission settings can be changed using an open communication protocol providing maximum configurability depending on the intended application.
To complete a network with an industrial sensor at one end, a USB Modem is required at the receiving end (PC end) that receives data from sensor.
Getting Started
The sensor and Zigmo/Router come pre-programmed and work out of the box. In this section we will setup a sensor and Zigmo link and start receiving data on our PC. Though this guide shows how to visualize data on LabVIEW utility, you can also use a simple serial terminal to see raw data by following these steps.
Power-up the Wireless Sensor and make sure its antenna is installed
Connect your Zigmo/Router to your PC
Figure 1: Connect Zigmo/Router to PC
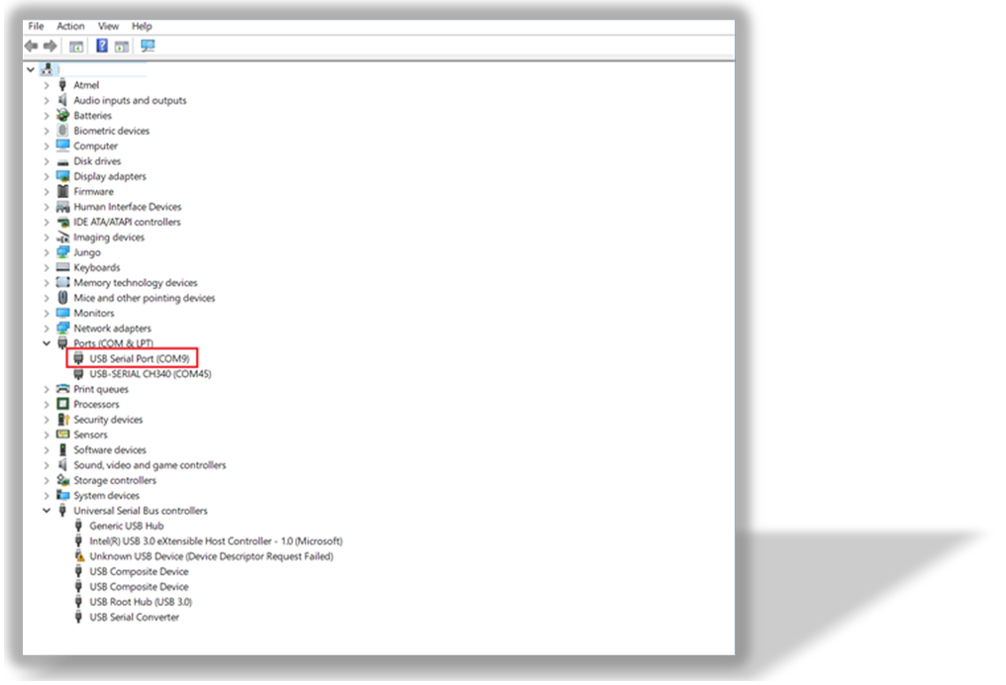
Identify the serial port allocated to it by going into device manager (You can also find the serial port using Digi provided utility XCTU)
At this stage, both the Sensor and Zigmo have automatically established communication and the data can be read from the serial port at which Zigmo has been installed.
Figure 2: Serial port identification
Troubleshooting
Changed/Unknown setting at sensor end
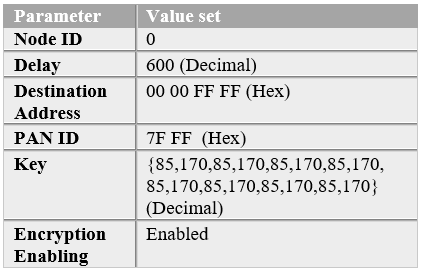
One of the issues for unsuccessful communication can be a changed setting at the sensor end due to which the sensor and Zigmo are unable to establish a connection. You can resolve this problem by going back to the factory default settings which are provided in Table 1. Please refer to Figure 7 and follow steps shown in it for applying factory default settings.
Once the sensor resets it will start sending a frame every 600 seconds after factory reset.
One of the issues for unsuccessful communication can be a changed setting at the sensor end due to which the sensor and Zigmo are unable to establish a connection. You can resolve this problem by going back to the factory default settings which are provided in Table 1. Please refer to Figure 7 and follow steps shown in it for applying factory default settings.
Once the sensor resets it will start sending a frame every 600 seconds after factory reset.
Please refer to the detailed document available to Digi website to understand X-bee communication parameters and its operation mechanism.
Table 1: Default Parameters programmed after Factory reset sequence
Changed/Unknown setting at PC end
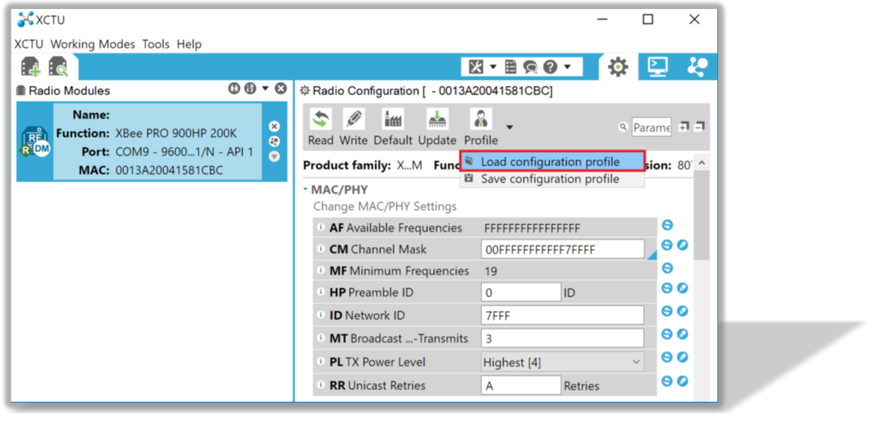
Sometimes a changed setting at Zigmo end, whether intentional or unintentional, can cause a network failure and no data reception at PC end. To fix this issue when the sensor end is operating at factory default settings you will have to bring the Zigmo/Router to factory default settings as well. For that, please download the configuration file for Zigmo from our website. You will also require XCTU utility provided by Digi.
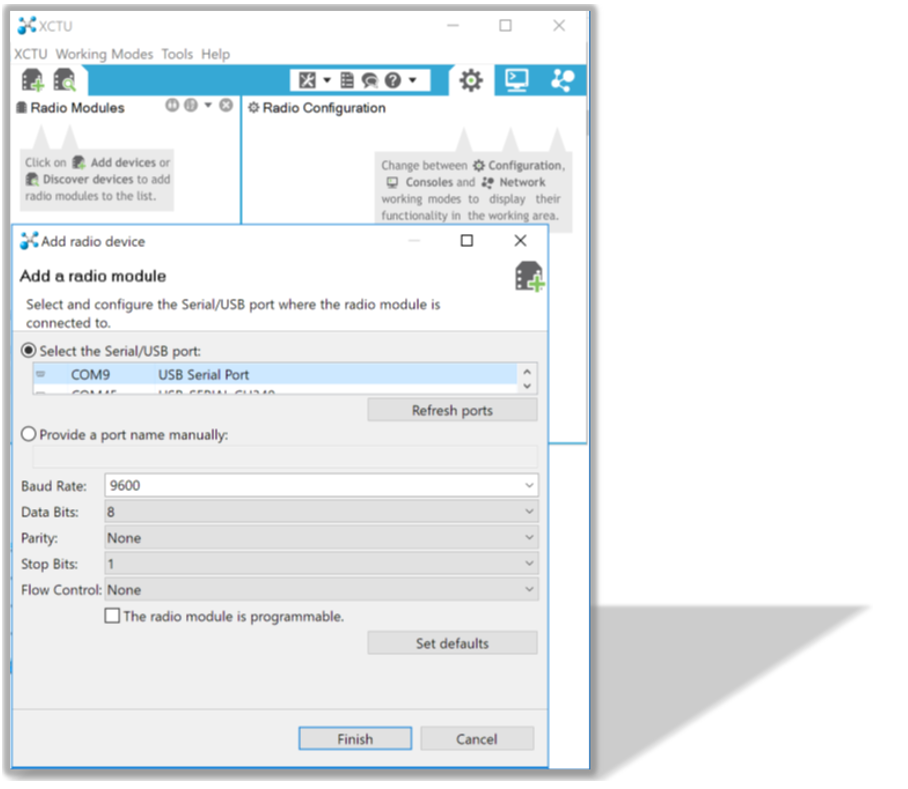
After installing XCTU Utility, run it and go to add a radio module. Select the serial port at which Zigmo is connected and press finish. This will connect the Zigmo to XCTU.
Figure 5: Connecting Zigmo/Router to XCTU
After double clicking the added module, a list of parameters will be displayed on the right side. Select the load configuration file from the top and select configuration file form the location where you downloaded it earlier.
Now press the write button on top to write these parameters. Close the XCTU utility and open the LabVIEW utility and follow the steps in getting started section to communicate with sensor.
Figure 6: Loading a default profile to Zigmo/Router
Modes of Operation
This module incorporates 2 modes of operation, these are
Run Mode
Configuration Mode
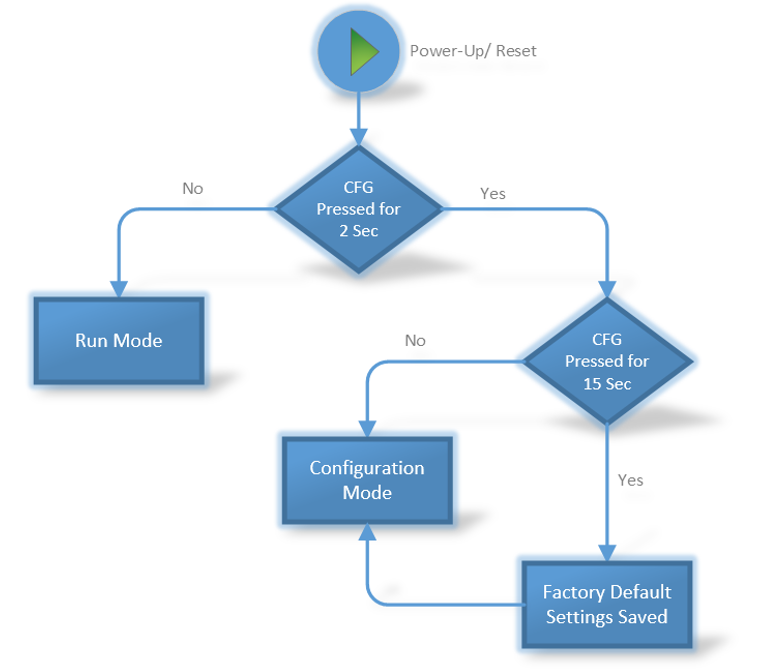
Run mode is the standard mode, the module will always enter Run mode if no button is pressed during Power-up/Reset. Configuration mode is intended to configure sensor parameters and the X-bee parameters on the sensor end. Note that the Sensor end X-bee is only configurable via the sensor controller using the commands provided in device manual. Figure 7 illustrates these modes.
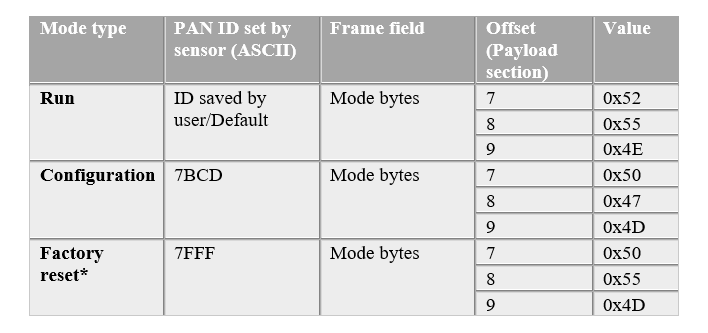
The device sends a startup packet which can be used to determine the mode in which it is operating. These packets are shown in Table 2.
Mode Selection Process
The CFG button on the module is used to change mode. If CFG button is pressed and the module reset button is pressed, the module will enter the configuration mode. The amount of time CFG button has to be pressed is shown in Figure 7.
Note that settings only take effect after the reset.
Figure 7: Mode Selection Process
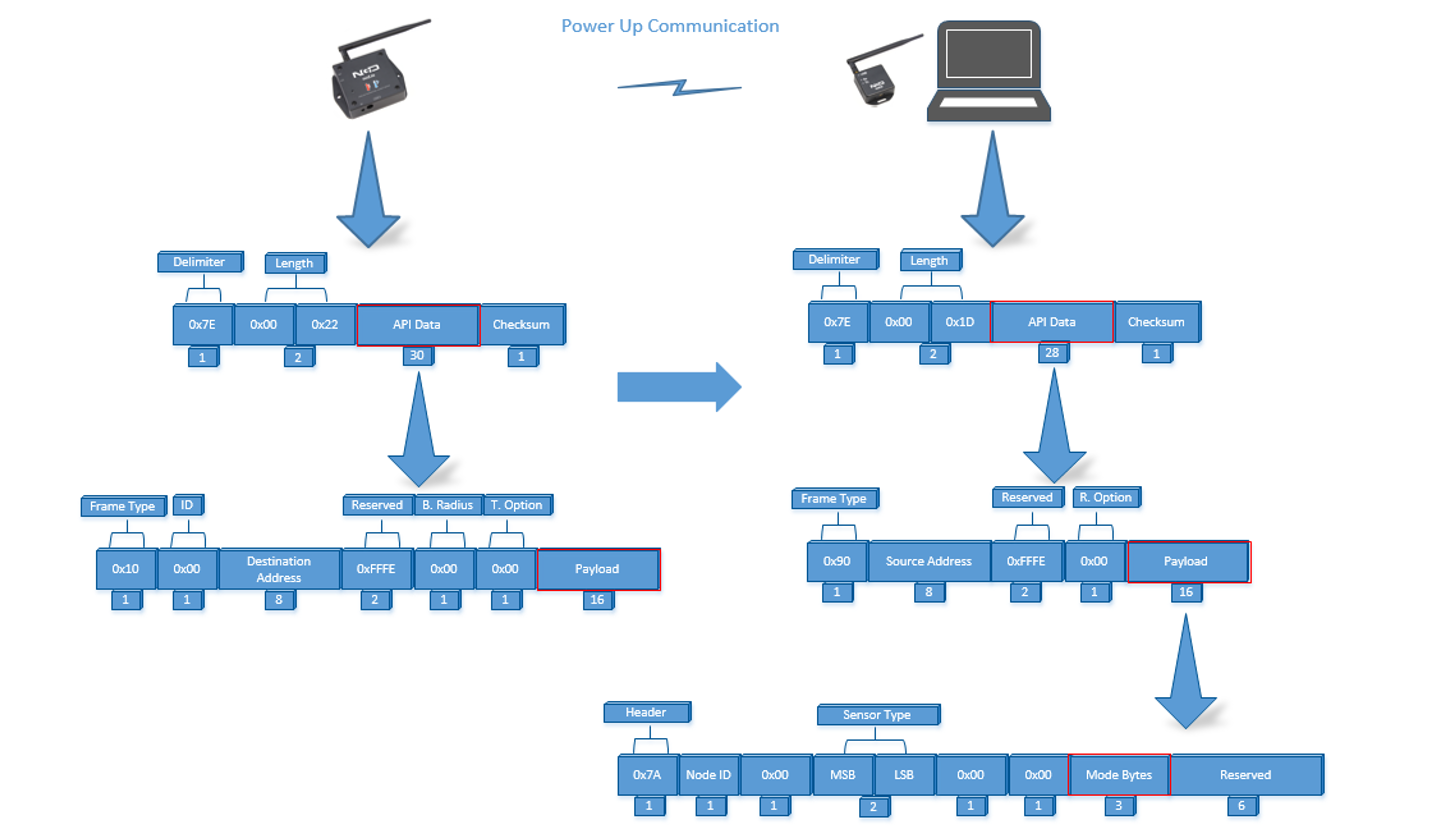
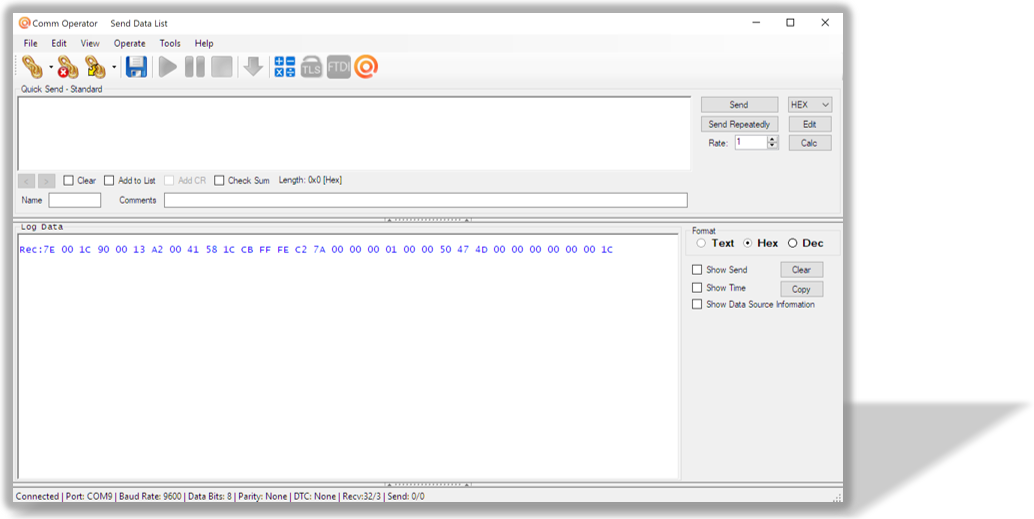
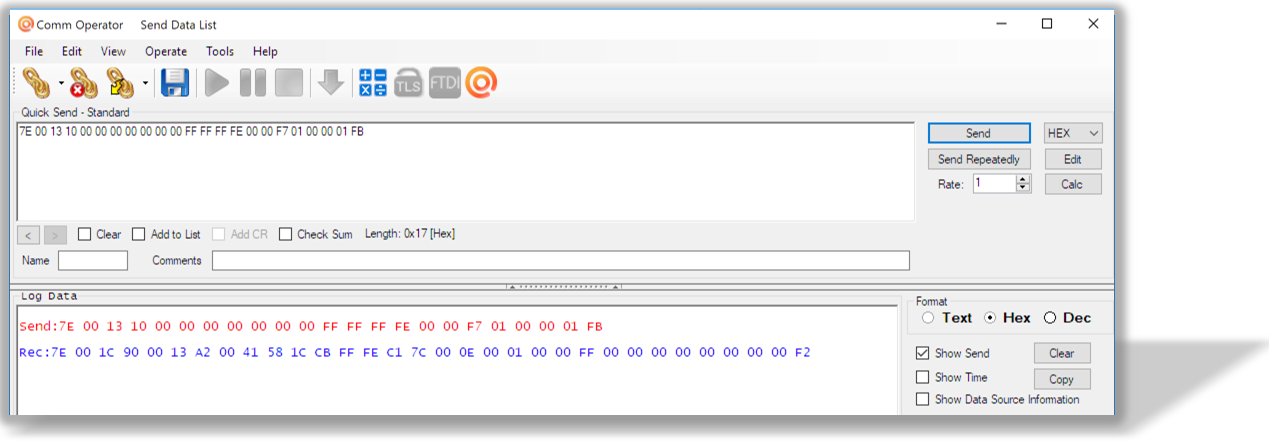
Frame Communication at Power up
In figure 8, Mode bytes highlighted in red can be compared with the values provided in Table 2 to determine the mode in which the sensor is operating. Node ID is the ID of the given sensor while sensor type determines the type of sensor. Both of these can be used to determine the exact sensor which is sending the information.
A shown in second column in Table 2, the sensor configures its PAN ID automatically depending upon the mode it is working in. During factory reset it sets the PAN ID to the value given in table therefore the factory reset frame will only be received if your Zigmo/Router PAN ID matches this ID. Please note that right after factory reset the sensor enters configuration mode therefore its PAN ID is changed again and a new frame is generated. All 3 type of frames are shown in Figure 9, Figure 10 and Figure 11.
The factory default settings are shown in Table 1. For parameter description please refer to the section on configuration.
Table 2: Mode Bytes for different sensor modes (* this frame is followed by configuration frame as shown Figure 7)
Figure 8: Typical Communication at Power Up, Transmitted packet (left) Received packet (right)
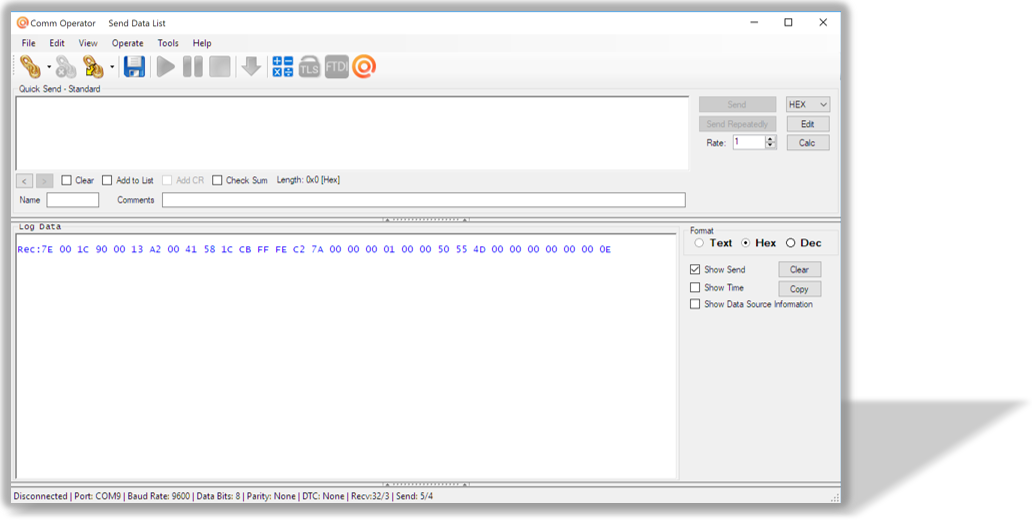
Figure 9: Run Mode Power up frame
Figure 10: Configuration Mode Power up frame
Figure 11: Factory Default Power up frame
Run Mode
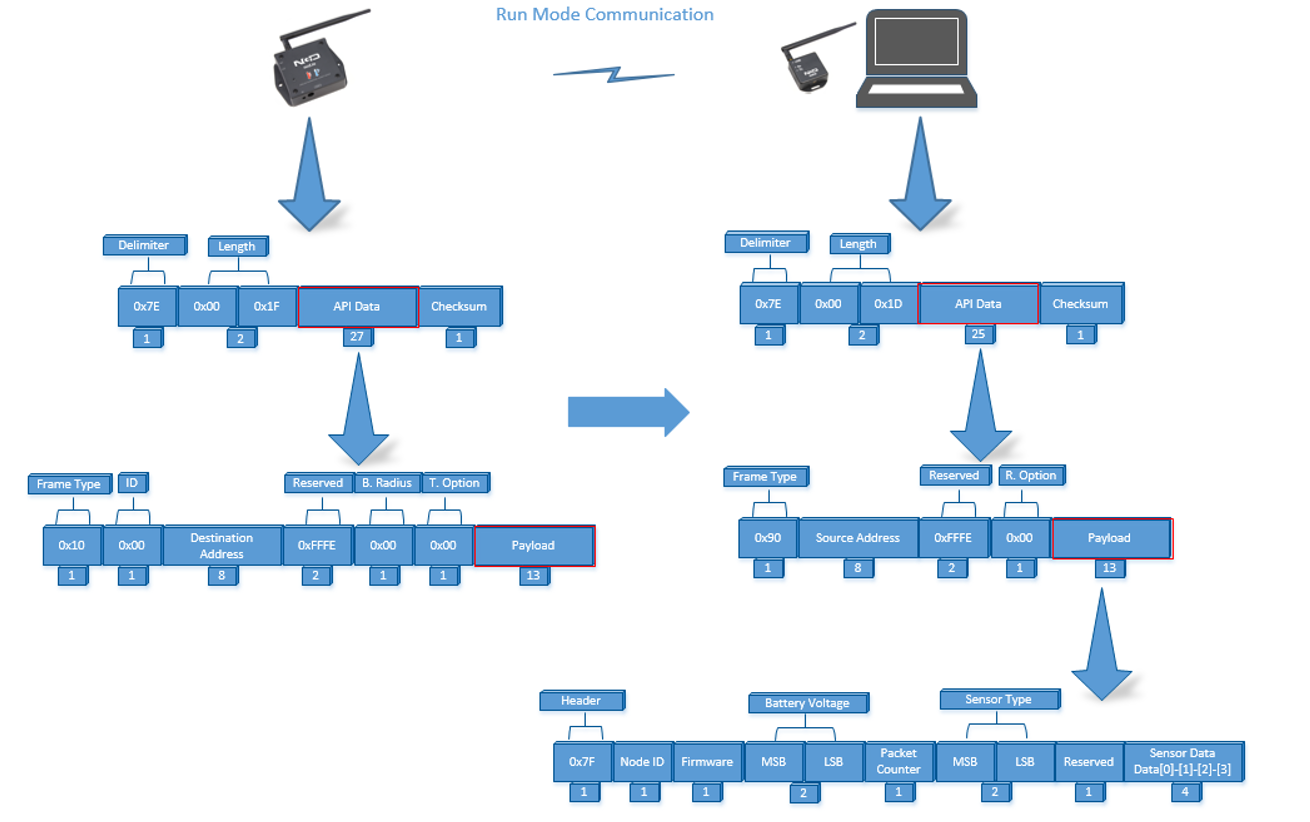
Run mode is the default mode of operation of this sensor. In this mode the sensor sends periodic packets to destination receiver. During the time it is not sending packets, it sleeps and conserves power. Sensor end X-bee operates in API mode and sends packets to the saved destination address on the network specified by the saved PAN ID. Figure 12 illustrates an API packet transmission and reception.
Packet reception at receiver end is ensured by the device by retrying up to 3 times if no acknowledgement is received that the packet has been successfully received. The device uses the acknowledgement functionality available in API mode in X-bee devices therefore user does not need to worry about sending acknowledgements for every packet.
Figure 12: Transmit packet detail (left), Received packet detail (right)
The detail for API packet received at PC end can be read from the X-bee manual available from Digi. The detail of Payload section of packet is shown in Table 3.
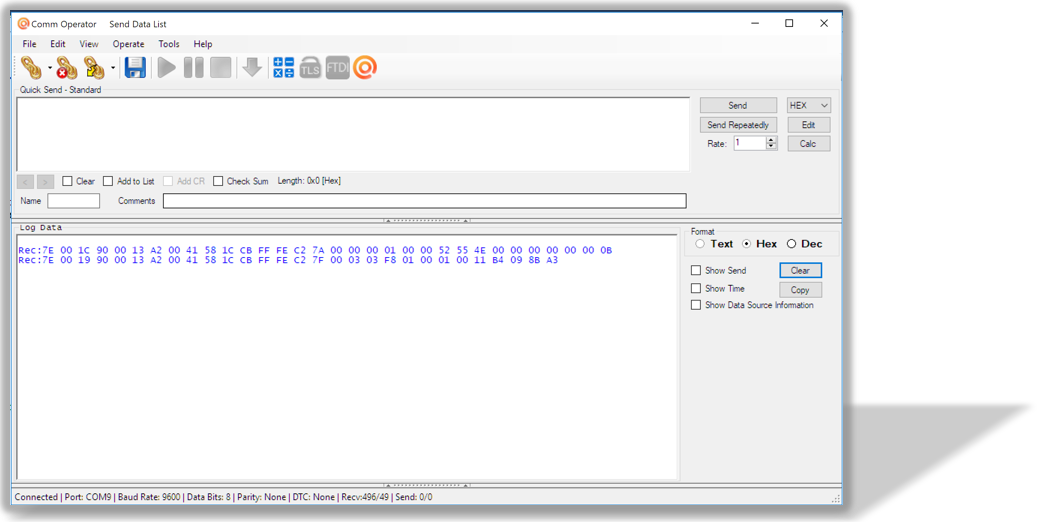
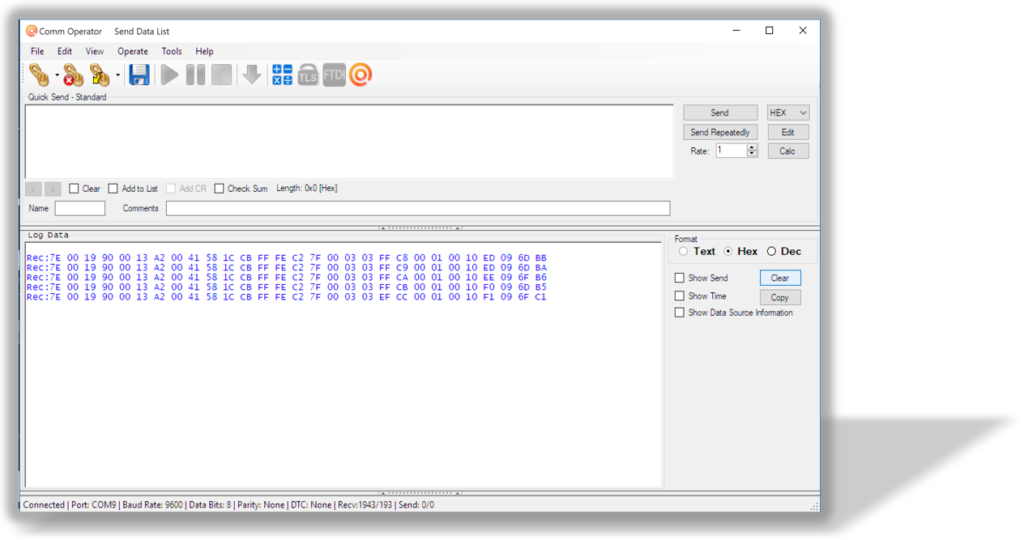
Typical response from the device in Run mode is shown in Figure 13 and Figure 14. The utility shown in Figure 14 can be downloaded from the website.
The detail for API packet received at PC end can be read from the X-bee manual available from Digi. The detail of Payload section of packet is shown in Table 3.
Typical response from the device in Run mode is shown in Figure 13 and Figure 14. The utility shown in Figure 14 can be downloaded from the website.
Frame Field
Offset (Payload Section)
Fixed Value (if any)
Description
Header
0
0x7F
Header to differentiate various type of packets
Node ID
1
0x00 Factory Default
Node ID to differentiate up to 256 nodes in a network. User configural values
Firmware
2
–
Used to determine firmware version programmed in the device
Battery Voltage
MSB 3
–
Sampled battery voltage of the device.
Battery Voltage=((Battery Voltage MSB x 256+Battery Voltage LSB) x 0.00322 V
LSB 4
–
Packet Counter
5
–
It is an 8-bit counter that increments with each packet transmission. It can be used to detect missing packets.
Sensor Type
MSB 6
0x00
Two bytes to determine sensor type. It can be used in conjunction with Node ID to create sensor networks of up to 256 nodes for a single type of sensor and multiple such networks can coexist and can be differentiated in processing software on PC end
Humidity(usigned) = ((data[0] x 256) + data[1])/100
14/ Data[5]
–
15/ Data[6]
–
Temperature data
Temperature(signed) = (((data[2] x 256) + data[3])/100)°C
LSB 16/ Data[7]
–
Figure 13: Run mode packets being received in a terminal (Hex mode)
Configuration Mode
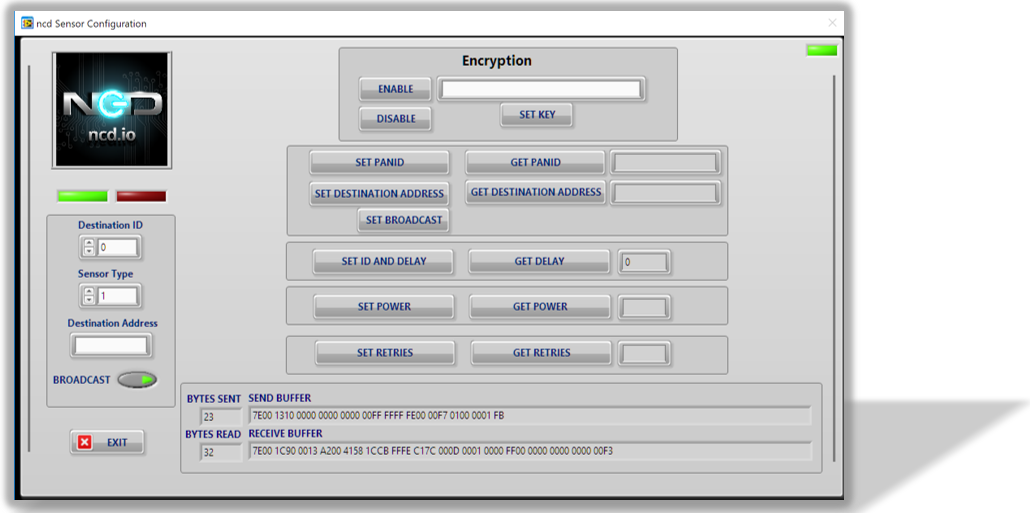
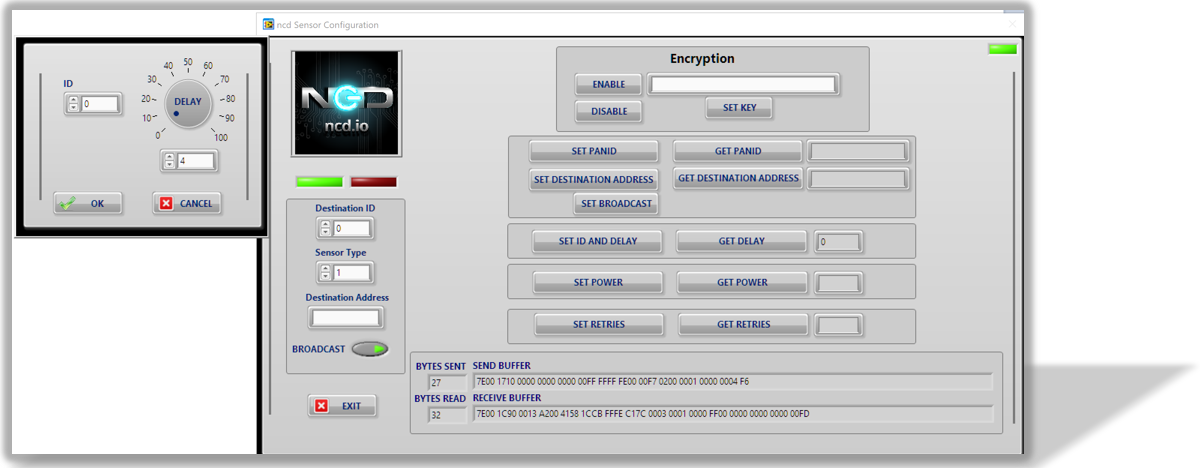
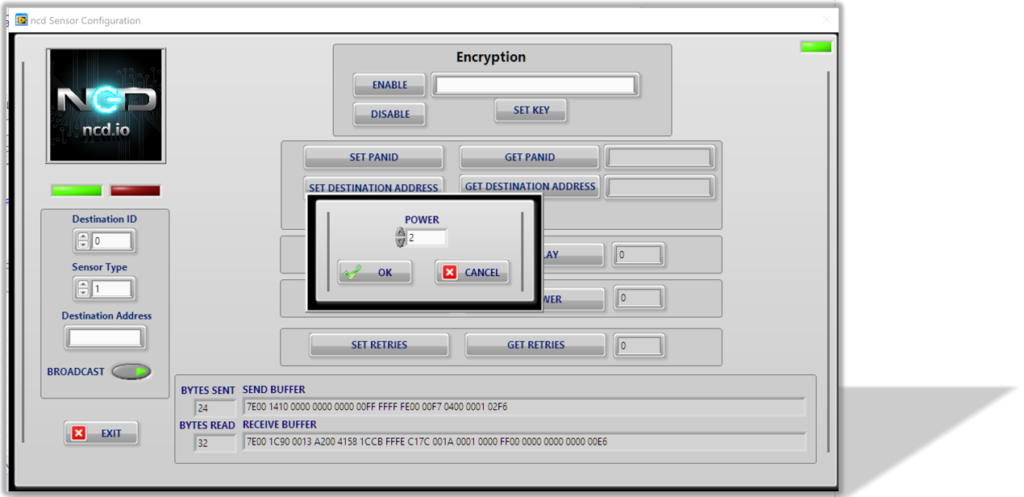
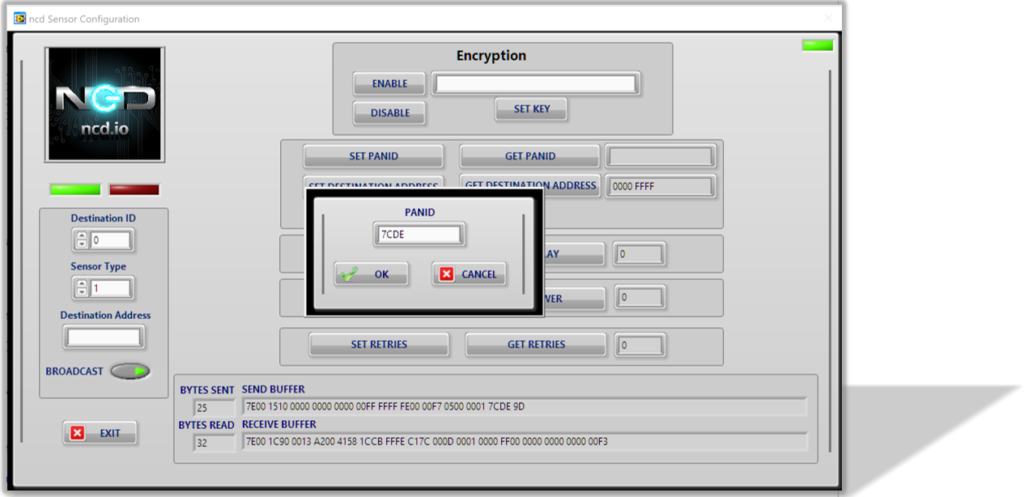
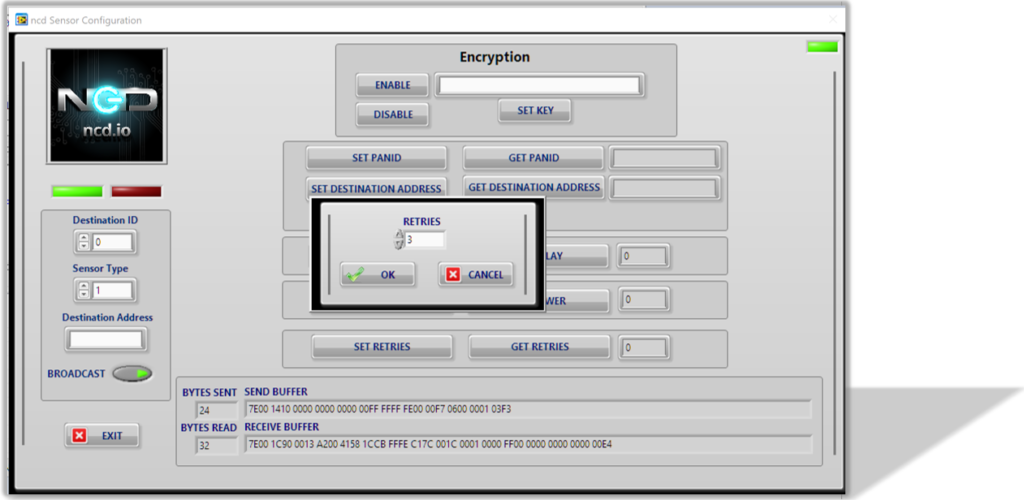
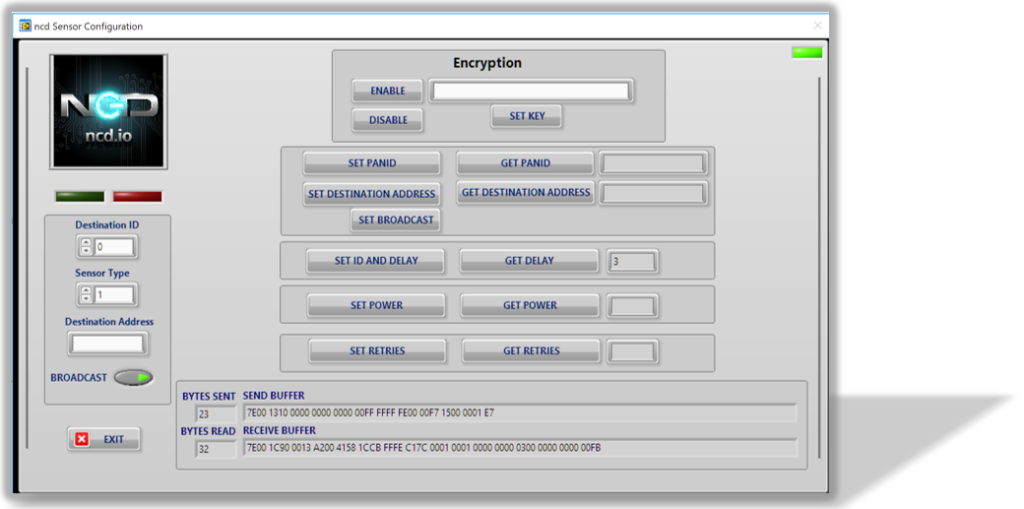
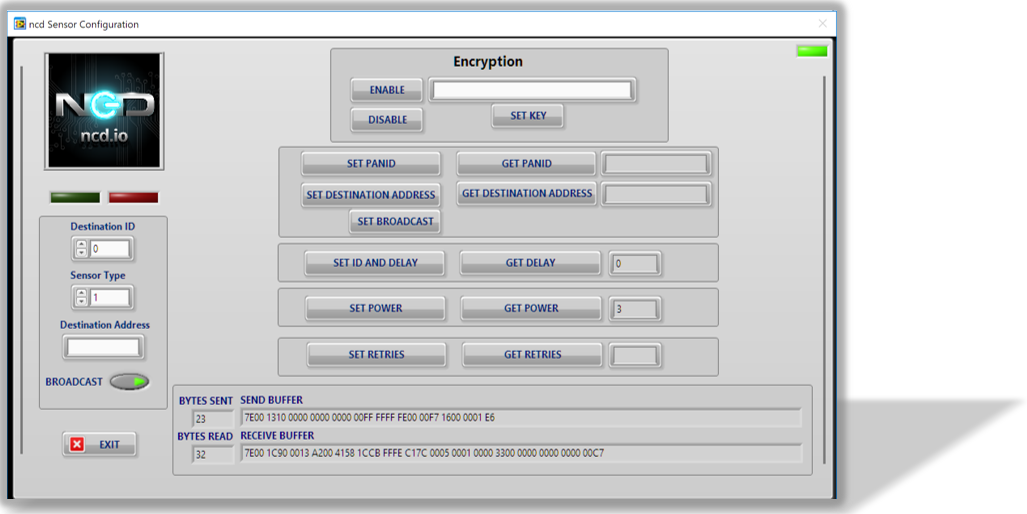
Configuration mode is intended to setup the device over the wireless link. Entering configuration mode was already explained in the section “mode selection procedure”. User can also setup X-bee communication and networking parameters using this mode via PC. Note that settings only take effect after reset and are stored inside the device.
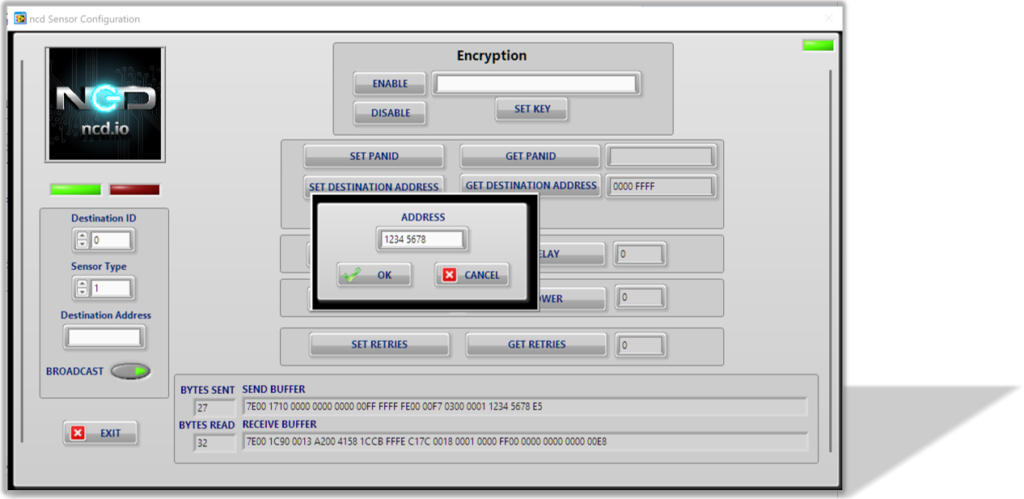
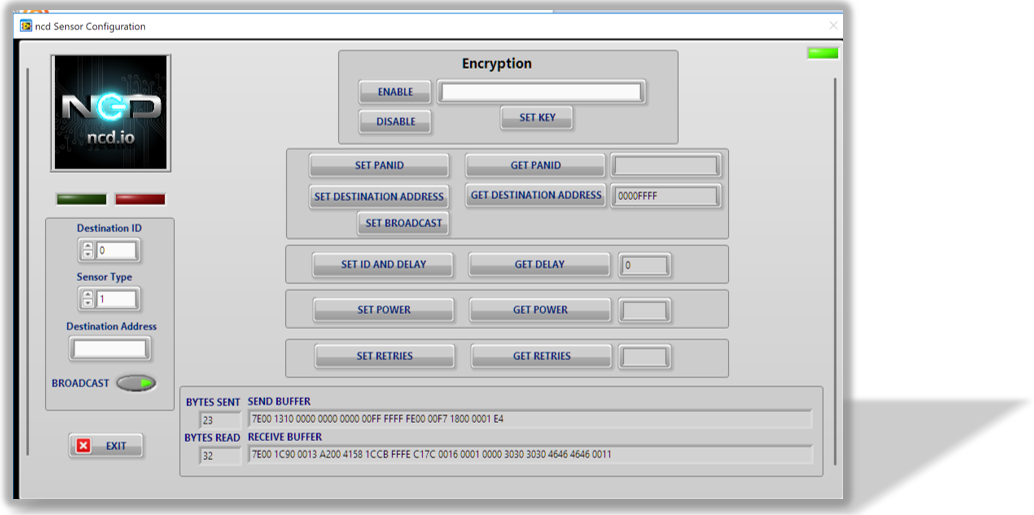
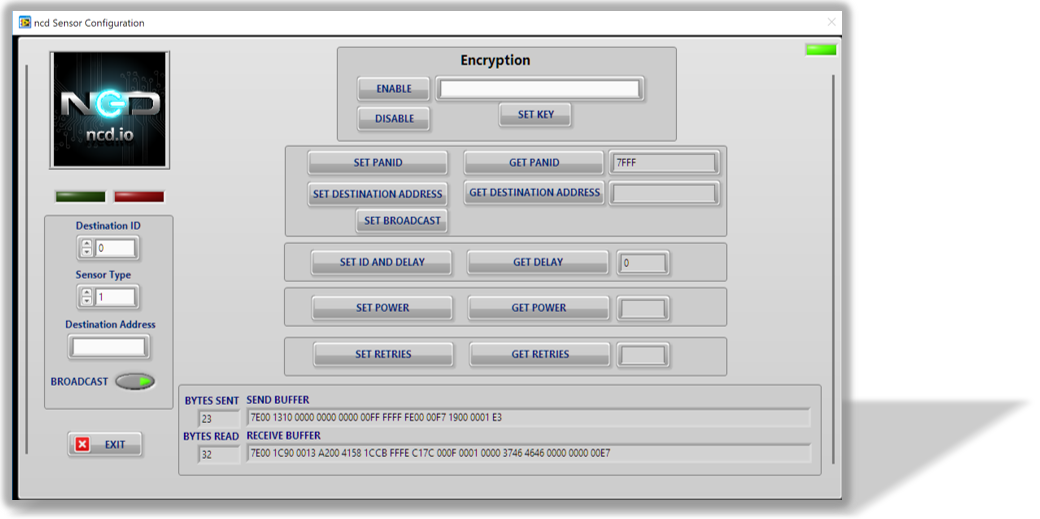
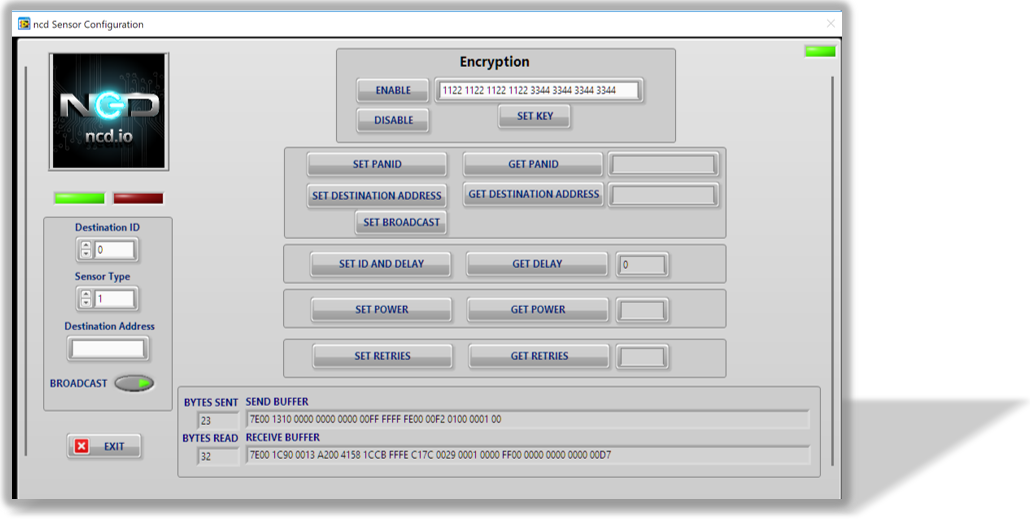
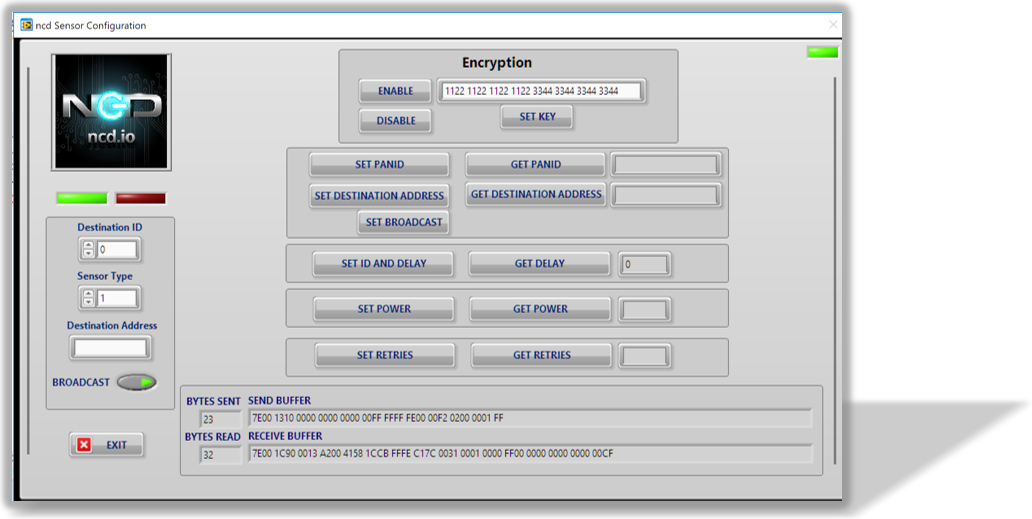
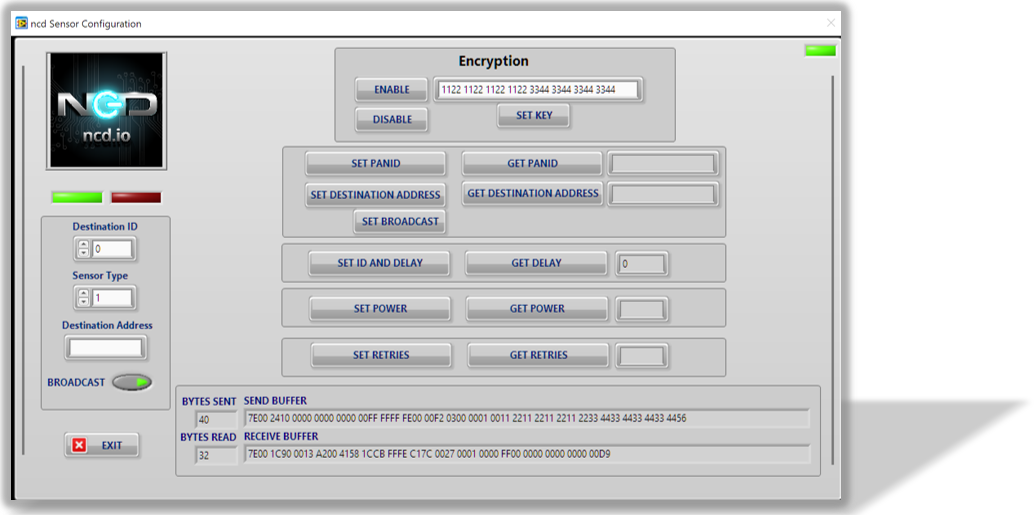
In configuration mode, the device sets its X-bee pan id to 7BCD (Hex). Also, the destination address used by the sensor is broadcast (0000FFFF). This ensures that once you put a device in configuration mode you just need to change the PAN ID of your Zigmo to match with sensor and start configuring your device. You can change the PAN ID of your Zigmo using XCTU from Digi. If you use our LabVIEW utility, it will automatically change Zigmo PAN ID once you open the configuration window. When you exit this window your PAN ID will be restored to old value.
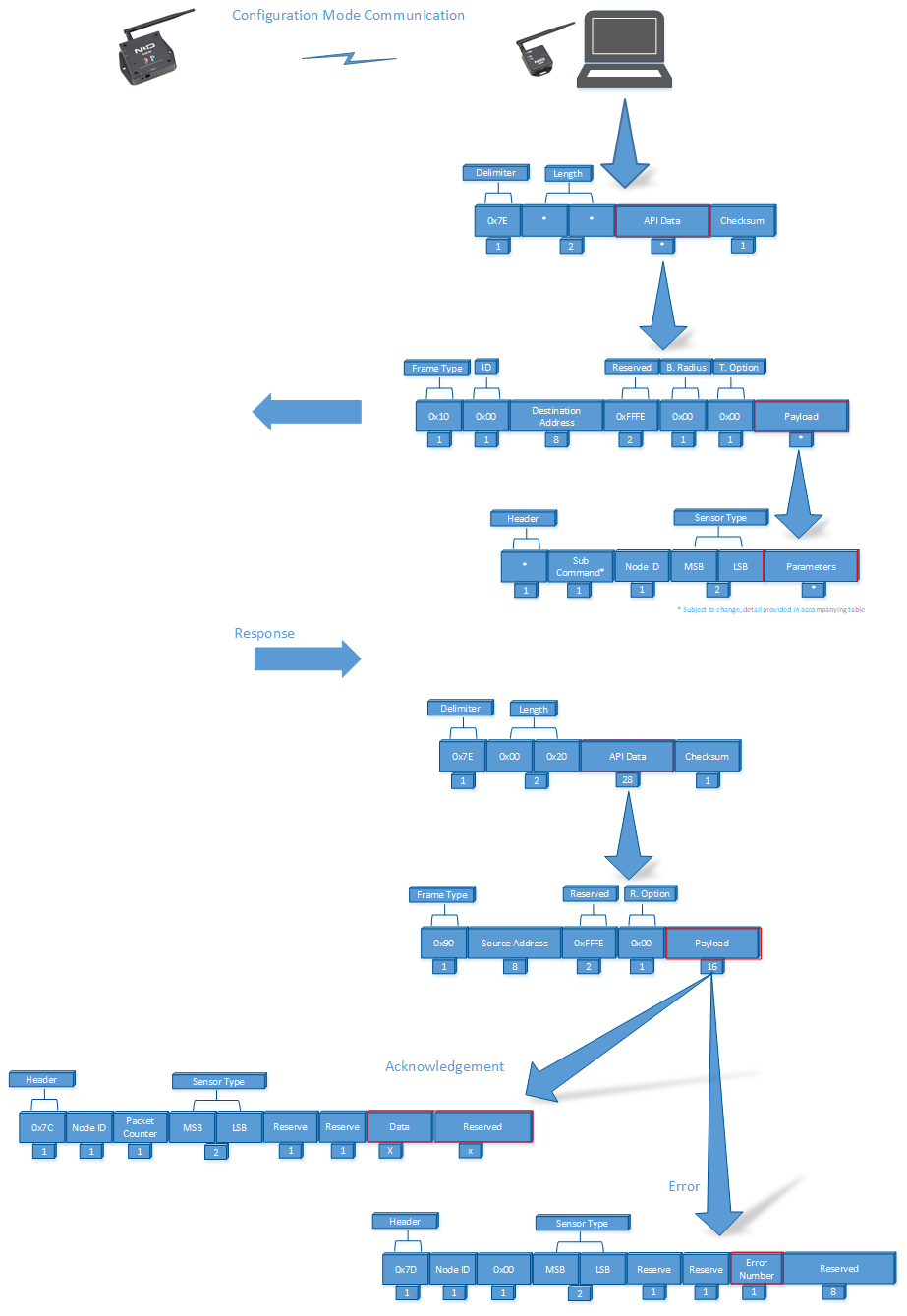
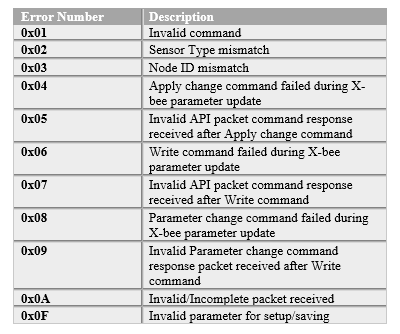
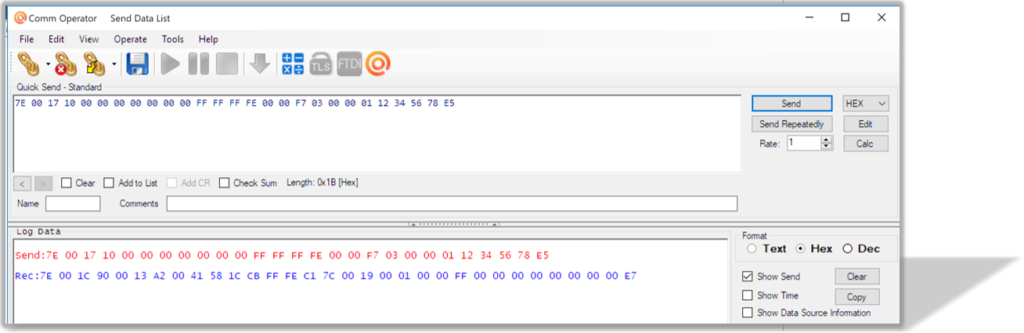
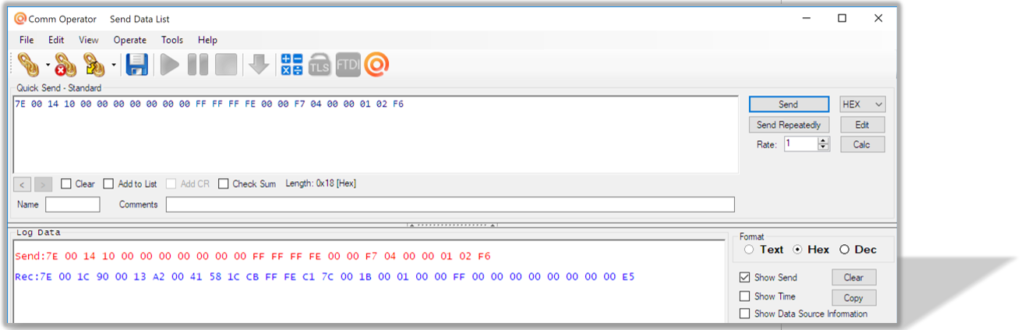
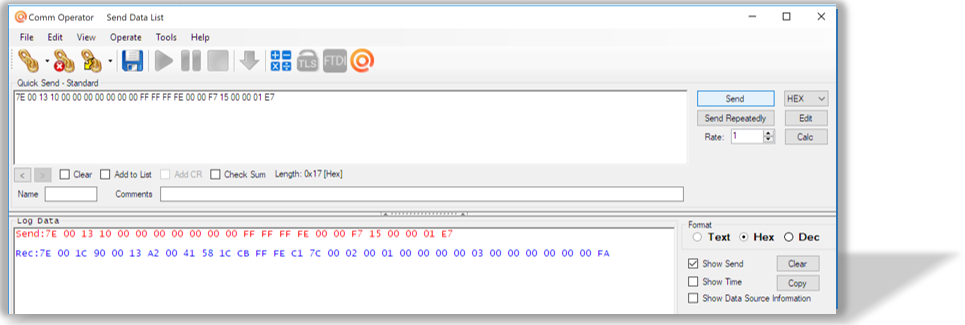
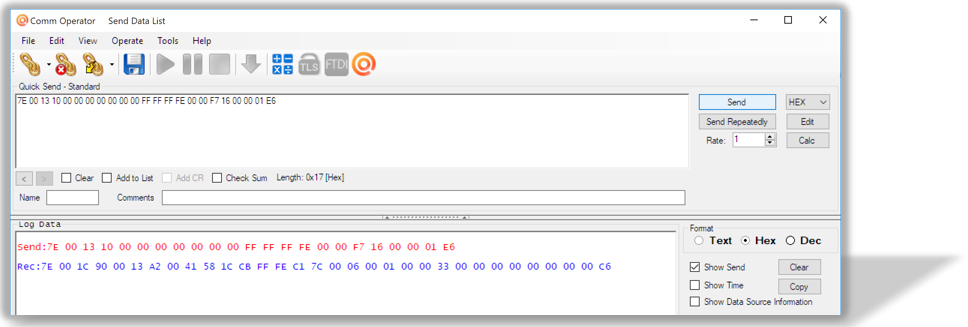
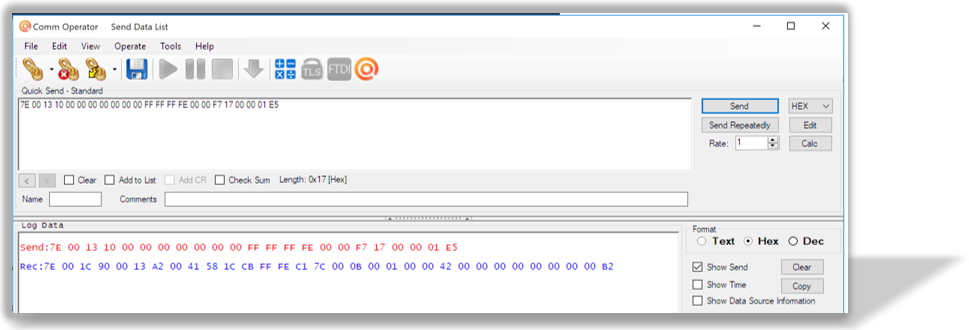
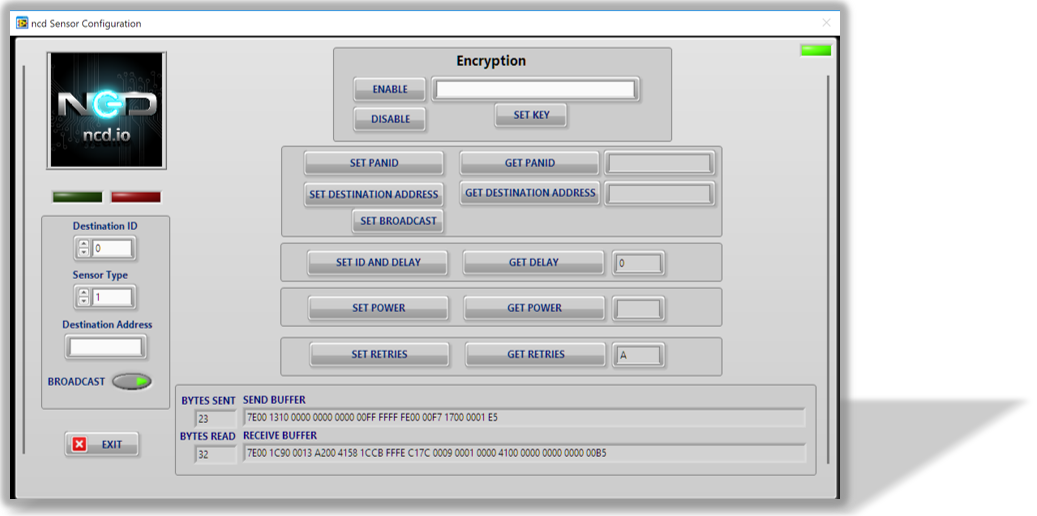
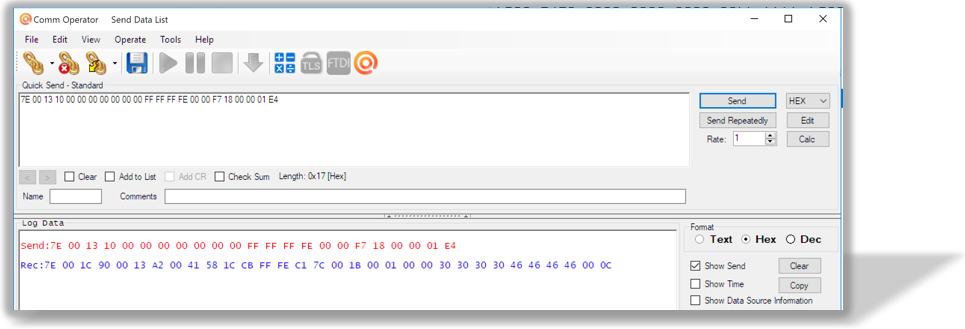
A standard configuration packet and its fields are explained in Figure 15. Its possible responses are also shown. The commands supported by this sensor are shown in Table 4, these can be used in the Parameters field of Payload section. The sensor responds to these commands with an acknowledgement if the process completed successfully or with an error if it failed to setup a parameter. The respective Data and Reserve section length and values are shown in Table 5 for the case of acknowledgement. In the case of error, the reserved section will be fixed and not used, while the Error number byte will determine the type of error returned. These errors are mentioned in Table 6.
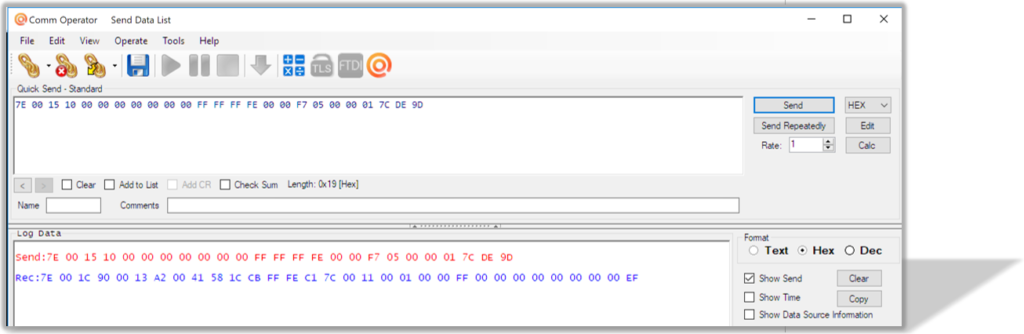
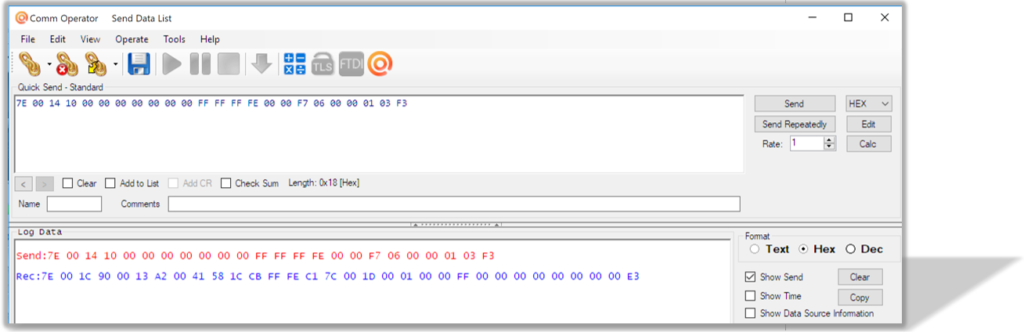
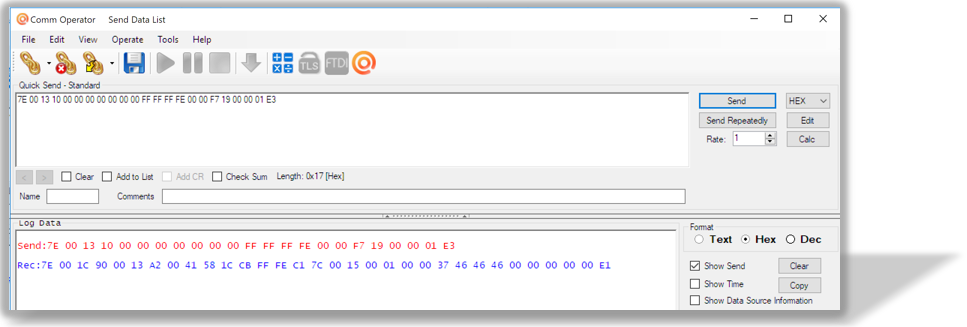
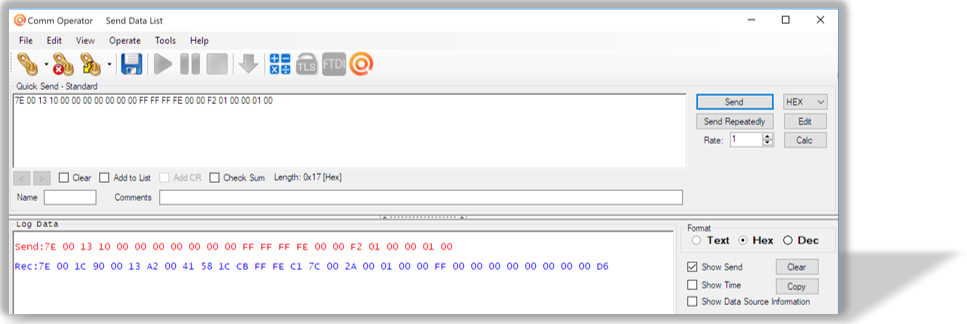
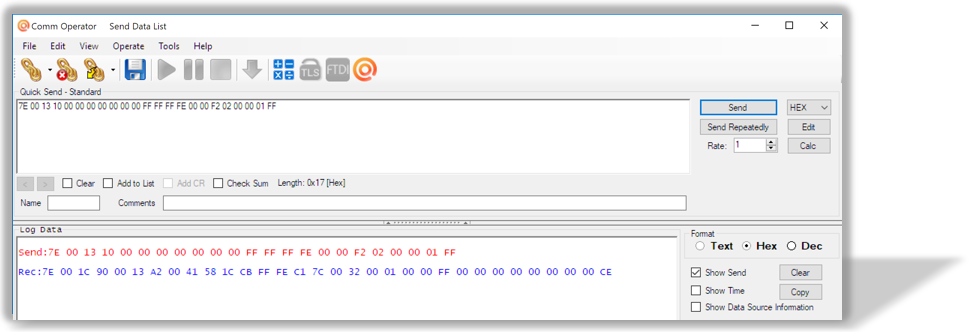
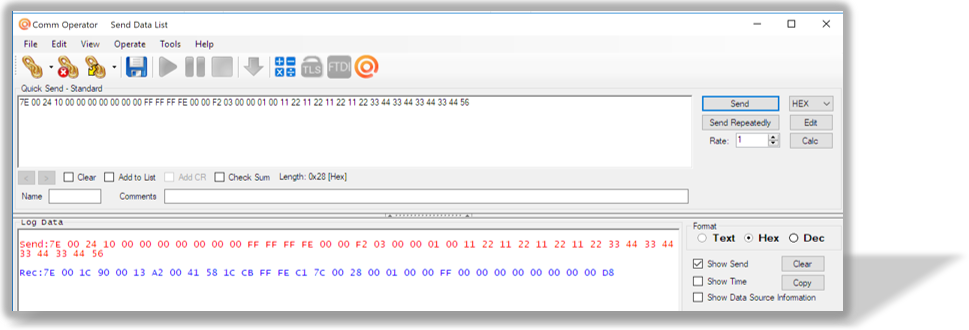
Figure 15 depicts standard communication between Zigmo/Router and sensor. Sensor commands have variable length frames whereas responses received from sensor are fixed length. The 2 scenarios are also shown, where a command can result in an acknowledgement reception or an error reception at the Zigmo end.
Examples for setting parameters in configuration mode are shown in Appendix A.
Figure 15: Configuration mode communication
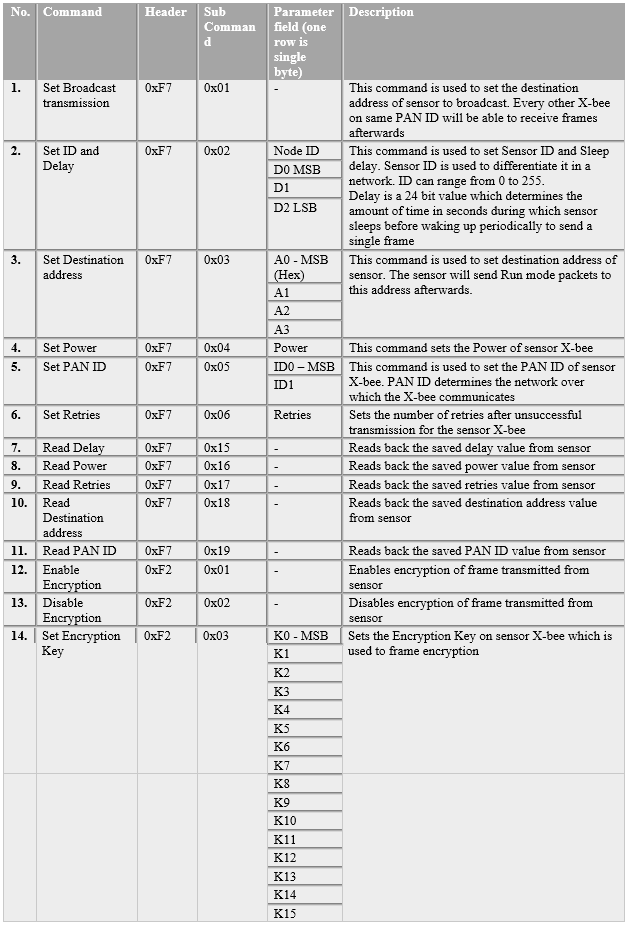
Table 4: Configuration Commands and their respective headers, sub command and Parameter field
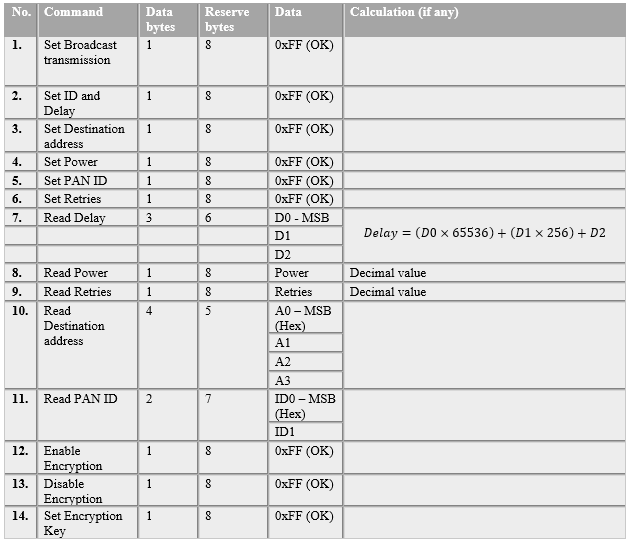
Table 5: Acknowledgment data for various commands and the size of reserve section in each case
Command For COPY: 7E 00 15 10 01 00 00 00 00 00 00 FF FF FF FE 00 00 F4 1E 00 00 35 00 04 A
Above command is setting the temp Offset value to 4
The on-board RH/T sensor is influenced by thermal self-heating of SCD30 and other electrical components. Design-in alters the thermal properties of SCD30 such that temperature and humidity offsets may occur when operating the sensor in end-customer devices. Compensation of those effects is achievable by writing the temperature offset found in continuous operation of the device into the sensor. Temperature offset value is saved in non-volatile memory. The last set value will be used for temperature offset compensation after repowering.
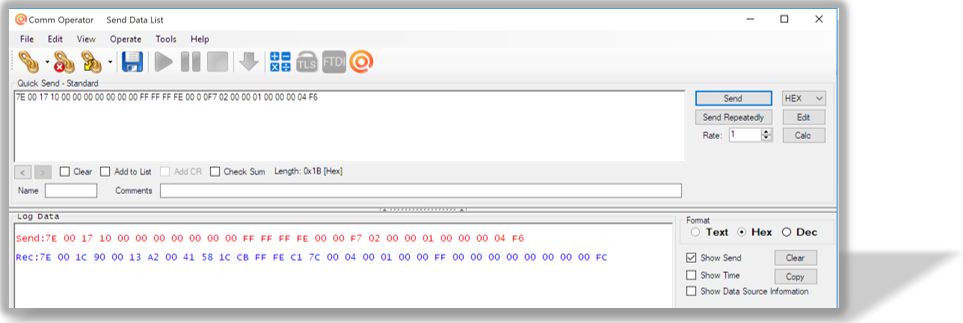
15. Set Sensor Altitude Value
Command For COPY: 7E 00 17 10 00 00 00 00 00 00 00 FF FF FF FE 00 00 F7 1C 00 00 00 00 03 F6 00 E8
Above command is setting the Altitude value to 1014
Starts continuous measurement of the SCD30 to measure CO2 concentration, humidity and temperature. Measurement data which is not read from the sensor will be overwritten. The measurement interval is 2s. Continuous measurement status is saved in non-volatile memory. When the sensor is powered down while continuous measurement mode is active SCD30 will measure continuously after repowering without sending the measurement command. The CO2 measurement value can be compensated for ambient pressure by feeding the pressure value in mBar to the sensor. Setting the ambient pressure will overwrite previous settings of altitude compensation. Setting the argument to zero will deactivate the ambient pressure compensation (default ambient pressure = 1013.25 mBar). For setting a new ambient pressure when continuous measurement is running the whole command has to be written to SCD30.
Measurements of CO2 concentration based on the NDIR principle are influenced by altitude. SCD30 offers to compensate deviations due to altitude by using the following command. Setting altitude is disregarded when an ambient pressure is given to the sensor.
16. Set Sensor Forced Calibration Value
Command For COPY: 7E 00 15 10 01 00 00 00 00 00 00 FF FF FF FE 00 00 F4 1F 00 00 00 01 BD 22
Above command is setting the force calib value to 445 ( 01 BD)
Forced recalibration (FRC) is used to compensate for sensor drifts when a reference value of the CO2 concentration in close proximity to the SCD30 is available. For best results, the sensor has to be run in a stable environment in continuous mode at a measurement rate of 2s for at least two minutes before applying the FRC command and sending the reference value. Setting a reference CO2 concentration by the method described here will always supersede corrections from the ASC. and vice-versa. The reference CO2 concentration has to be within the range 400 ppm ≤ cref(CO2) ≤ 2000 ppm. The FRC method imposes a permanent update of the CO2 calibration curve which persists after repowering the sensor.
Command support — Firmware version 3 or above.
Appendix B
Frame Checksum Calculation
In order to successfully communicate over the API protocol, checksum is of vital importance. The X-bee at either end will reject packets if the checksum is not matched. Checksum is also checked by the sensor controller and LabVIEW utility for added security.
For sending packets, checksum calculation works as follows
Not including the frame delimiter and length, add all the bytes and keep the lower 8 bits of result
Subtract this value from 0xFF (hex)
The resultant value is the checksum
Append this byte to the original packet for sending
Consider the example for the command Set Broadcast shown in Figure 19 in A APPENDIX and see that the calculated checksum matches with the checksum sent by the terminal/LabVIEW
Although checksum is matched by the X-bee itself, but for understanding follow these steps to match checksum at reception
Not including the frame delimiter and length, add all the bytes including the received checksum
Keep only the last 8 bits
If the result is 0xFF, the checksum is correct and the packet can be processed.
Consider the example of the command Set Broadcast shown in Figure 19 in A APPENDIX and see that the received packet checksum verifies since the result is 0xFF.